
Рефераты по рекламе
Рефераты по философии
Рефераты по финансам
Рефераты по химии
Рефераты по цифровым устройствам
Рефераты по экологическому праву
Рефераты по экономико-математическому моделированию
Рефераты по экономической географии
Рефераты по экономической теории
Рефераты по этике
Рефераты по юриспруденции
Рефераты по языковедению
Рефераты по юридическим наукам
Рефераты по истории
Рефераты по компьютерным наукам
Рефераты по медицинским наукам
Рефераты по финансовым наукам
Рефераты по управленческим наукам
Рефераты по строительным наукам
Психология педагогика
Промышленность производство
Биология и химия
Языкознание филология
Издательское дело и полиграфия
Рефераты по краеведению и этнографии
Рефераты по религии и мифологии
Рефераты по медицине
Рефераты по сексологии
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Курсовая работа: Моделювання задач масового обслуговування ЕОМ
Курсовая работа: Моделювання задач масового обслуговування ЕОМ
Міністерство освіти і науки України
Рубіжанський політехнічний коледж ім. О. Є. Порай-Кошиці
Луганського національного педагогічного університету
імені Тараса Шевченка
Курсовий проект
з предмету « Технічне обслуговування ЕОМ»
КП. 5.05010201.4.11.01.00
Виконав студент: гр. ___КД05___
________Шеремет О.В.._______
Дата _________________________
Керівник роботи
____Днепровський О.Ю.______
Дата _______________________
2009 рік
Міністерство освіти і науки України
Рубіжанський політехнічний коледж ім. О. Є. Порай-Кошиці
Луганського національного педагогічного університету
імені Тараса Шевченка
Відділення: економічне
Затверджено Спеціальність 5.050102501
ЗАВДАННЯ
для курсового проектування
Студента ___ курсу групи ___________________________________________
____________________________________________________________
Тема курсового проекту:_____________________________________________ __________________________________________________________________
_____________________________________________________________
____________________________________________________________
Курсовий проект виконано в такому обсязі
Вступ
1. Теоретична частина:
Опис теоретичних питань по задачах масового обслуговування;
Побудова моделі задачі масового обслуговування;
2. Опис конкретного пристрою та засобів з його обслуговування
Історія розвитку цифрового пристрою (ЦП)
Опис складових ЦП
Технічні та програмні засоби обслуговування ЦП
3. Розрахунок надійності цифрового вбудованого контролеру
4. Економічний розрахунок та обґрунтування конфігурацій ЕОМ
Висновок
Перелік використаних джерел
Керівник курсового проекту ____________________
Дата видачі «___»_________________200__р.
Дата закінчення
Курсового проекту «___»_________________200__р.
Зміст
Вступ
1. Моделювання задач масового обслуговування
1.1 Опис теоретичних питань по задачах масового обслуговування
1.1.1 Класифікація систем масового обслуговування
1.1.2 Задачі аналізу одноканальних систем масового обслуговування
1.1.2.1 Задача аналізу детермінованої системи
1.1.2.2 Задача аналізу розімкнутої системи з очікуванням (потоки вимог Пуасоновські)
1.1.2.3 Задача аналізу замкнутої системи з очікуванням (потоки вимог Пуасоновські)
1.2 Дослідження моделі обслуговування ЕОМ з комбінованим відновленням після відмов однотипних Тезів
1.2.1 Метод побудови моделі
1.2.2 Програма
1.2.3 Опис програми ..
2. Технічні та програмні засоби обслуговування і експлуатації жорсткого диску
2.1 Технічний опис HDD IDE AT
2.1.1 Магнітні диски
2.1.2 Двигун шпінделя
2.1.3 Рідинний підшипник
2.1.4 Магнітні головки
2.1.5 Позиціонування
2.1.6 Канал зчитування/запису
2.1.7 Електронні компоненти вінчестера
2.2 Зберігання інформації
2.2.1 Розділи або Partitions .....
2.2.2 MBR
2.3 Класифікація несправностей жорстких дисків
2.3.1 Логічні несправності
2.3.2 Несправності електроніки диска
2.3.3 Руйнування службової інформації диска
3. Розрахунок надійності вбудованого контролера
3.1 Надійність систем. Поняття надійності
3.2 Кількісні характеристики безвідмовності .
3.2.1 Напрацювання на відмову
3.3 Постанова математичної моделі розрахунку
3.4 Розрахунок надійності вбудованого контролеру
4. Складання конфігурації ломпютера для придбання додаткового по причині розширення фірми
4.1 Завдання
4.2 Аналізнеобхідноїконфігурації
4.3 Склад конфігурації
4.4 Вибір відповідної конфігурації
Висновок
Літератіра
Вступ
У першому розділі курсового проекту з предмету технічне обслуговування ЕОМ я розглянув задачі масового обслуговування ЕОМ та модель для імітації виробничої діяльності ВЦ.
Задачі масового обслуговування умовно ділять на:
а) задачі аналізу;
б) задачі синтезу.
Задачі аналізу використовують оцінку ефективності функціонування системи масового обслуговування при незмінних, наперед заданих вхідних характеристиках системи; структури системи; дисципліни обслуговування; потоках вимог та законів розподілу часу їх обслуговування.
Задачі синтезу направлені на пошук оптимальних параметрів системи масового обслуговування. Систему масового обслуговування в загальному випадку можна представити як сукупність послідовно зв’язаних між собою вхідних потоків вимог на обслуговування черг, каналів обслуговування та вихідних потоків вимог. імітації виробничої діяльно ВЦ при планово- попереджувальному обслуговуванні. Модель для виробничої діяльності ВЦ розглядає наступне питання: "Розробка моделі для експлуатованого парку ЕОМ.
У другому розділі я розглянув обслуговування та експлуатацію жорстких дисків. Жорсткий диск – одна з основних частин ПК призначена для зберігання інформації. Маричні принтери. На мою думку жорсткий диск – це найважливіша частина комп’тера, так як саме головне, що знаходиться в ПК – це інформація. Тому, при пошкодженні та виходу з ладу жорсткого диску вся інформація може втратися. Щоб цього не сталося, в цьому розділі я описав, як можна попередити поломку жорсткого диску, його обслугогвування, та перші симптоми несправностей.
У третьому розділі я зробив розрахуємо надійність вбудованого контролера згідно варіанту. При розрахунку надійності враховується:
- відмови елементів є незалежними і випадковими подіями;
- враховуються тільки елементи, що входять в завдання;
- вірогідність безвідмовної роботи підкоряється експоненціальному закону розподілу;
- умови експлуатації елементів враховується приблизно за допомогою коефіцієнтів;
- враховуються катастрофічні відмови.
У четвертому розділі я склав конфігурацію комп’ютера для роботи з відео. Комп’ютер для роботи з відео призначений для обробки відео, а саме для кодування, зміни формату, редагівання та збереження відеофільмів. При виборі ПК слід дотримуватись таких вимог:
- відповідність апаратних засобів;
- надійність;
- ергономічність.
Можливість роботи комп’ютера в складі локальної комп’ютерної мережі, можливо скласти наступні вимоги до конфігурації:
- висока швидкість роботи процесора;
- достатній об’єм пам’яті;
- окрема відео карта;
- об’єм накопичувача на жорстких дисках більше середнього;
- наявність пишучого приводу DVD+-RW дисків (враховуючи відмову від виробництва гнучких дисків);
- вартість програмного забезпечення при складанні конфігурації не враховується.
1. Моделювання задач масового обслуговування
1.1 Опис теоретичних питань по задачах масового обслуговування
Задачі масового обслуговування умовно ділять на
- задачі аналізу;
- задачі синтезу;
Задачі аналізу використовують оцінку ефективності функціонування системи масового обслуговування при незмінних, наперед заданих вхідних характеристиках системи; структури системи; дисципліни обслуговування; потоках вимог та законів розподілу часу їх обслуговування.
Задачі синтезу направлені на пошук оптимальних параметрів системи масового обслуговування. Систему масового обслуговування в загальному випадку можна представити як сукупність послідовно зв’язаних між собою вхідних потоків вимог на обслуговування черг, каналів обслуговування та вихідних потоків вимог.
Схеми системи обслуговування приведені на рисунку 1.1:
Вхідні потоки Черга Канал Вихідні потоки
обслуговування
Рисунок 1.1 - Схеми системи обслуговування
Випадкових характер вхідного потоку вимог, а також час обслуговування каналів, призводить до утворення випадкового процесу, котрого потрібно дослідити.
1.1.1 Класифікація систем масового обслуговування
Якщо досліджені чи задані потоки вхідних вимог, механізм (число каналів обслуговування, час обслуговування та ін.) та дисципліна обслуговування, то це дає базис для побудови математичної моделі системи.
В задачах аналізу систем масового обслуговування в якості основних показників функціонування системи можуть бути використані:
1) ймовірність простою P0 каналу обслуговування;
2) ймовірність того, що в системі знаходяться n вимог (ймовірність Pn):
3) середнє число вимог, що знаходяться в системі
(Nсист = ![]() );
);
середнє число вимог, що знаходяться в черзі
![]() , де
, де
Nk – число каналів обслуговування.
4) Середній час очікування в черзі Tчерг.
Для розімкнутої системи
![]() , де
, де
![]() - це
інтенсивність надходження потоковимог в систему.
- це
інтенсивність надходження потоковимог в систему.
Для замкнутої системи:
![]() , де
, де
m – число вимог, що потребують обслуговування.
5) середній час очікування вимог в системі Tсист;
6) середнє число вільних каналів обслуговування:
![]()
7)
середнє число зайнятих
каналів обслуговування: ![]()
1.1.2 Задачі аналізу одноканальних систем масового обслуговування
Як видно з приведеної класифікації систем масового обслуговування, є велика кількість різновидностей. Обмежимось системами масового обслуговування які найбільш часто зустрічаються.
- детерміновані одноканальні
- одноканальні розімкнуті з найпростішим потоком надходження вимог до системи
- одноканальні замкнуті (потік вимог Пуассоновський) – з очікуванням.
Усі ці системи можуть бути досліджені аналітичними методами, побудованими на основі представлення процесу формування системи як марковського процесу з неперервнім часом та детермінованим станом.
1.1.2.1 Задача аналізу детермінованої системи
а) Постановка задачі.
Нехай досліджується виробничий процес, в котрому надходження вимог відбувається через рівні проміжки часу.
Таким чином: ![]() , тобто
інтенсивність потоку надходження вимог
, тобто
інтенсивність потоку надходження вимог ![]() , котра дорівнює
, котра дорівнює ![]() також є const, і
обслуговування проводиться через рівні проміжки часу
також є const, і
обслуговування проводиться через рівні проміжки часу ![]() (інтенсивність обслуговування
(інтенсивність обслуговування ![]() також є
const). Є один канал обслуговування, та вважається, що
також є
const). Є один канал обслуговування, та вважається, що ![]() , (інакше черга буде безкінечно
зростати)
, (інакше черга буде безкінечно
зростати)
Вважаємо також, що на початок обслуговування в системі уже знаходиться n вимог, і необхідно визначити, через який час черга зникне:
![]() - називається
коефіцієнтом використання.
- називається
коефіцієнтом використання.
Черга буде
безкінечно зростати, якщо ![]() , якщо він дорівнює одиниці, то
черга буде мати постійну довжину. Схематично робота системи масового
обслуговування що розглядається представляється наступним чином (рисунок 1.2):
, якщо він дорівнює одиниці, то
черга буде мати постійну довжину. Схематично робота системи масового
обслуговування що розглядається представляється наступним чином (рисунок 1.2):

![]()
![]()
вхідний потік вимог черга канал вихідний потік вимог
обслуговування
Рисунок 1.2
Поки
обслуговується черга з n вимог, протягом часу ![]() знову поступає на обслуговування
знову поступає на обслуговування ![]() перших вимог
перших вимог
![]()
Аналогічно
поки будуть обслуговуватися ![]() вимог протягом часу
вимог протягом часу ![]() додатково надійдуть на
обслуговування
додатково надійдуть на
обслуговування ![]() вимог.
вимог.
![]() ,
,
це
відбувається до тих пір, поки не буде виконуватись рівність ![]() , після чого черга
зникне.
, після чого черга
зникне.
Весь процес функціонування системи масового обслуговування можна представити в аналітичному вигляді.
Час, через котрий черга зникне, можна навіть представити у вигляді:
![]()
б) Дослідження математичної моделі.
Для обчислення часу, через який черга зникне необхідно розкрити математичну модель, а саме:
![]()
![]()
В моделі
використана формула суми геометричної прогресії. Чим ближче інтенсивність
потоку ![]() до
інтенсивності обслуговування
до
інтенсивності обслуговування ![]() , тим через більший проміжок часу
зникне черга. Якщо величиною
, тим через більший проміжок часу
зникне черга. Якщо величиною ![]() можна знехтувати для спрощення,
тоді можемо записати, що
можна знехтувати для спрощення,
тоді можемо записати, що ![]()
1.1.2.2 Задача аналізу розімкнутої системи з очікуванням (потоки вимог Пуасоновські)
а) Постановка задачі.
Нехай дана деяка система масового обслуговування, для котрої справедливі наступні гіпотези:
1) ймовірність надходження вимог не залежить від прийнятого початку відліку часу, а залежить тільки від часу періоду спостереження (потік стаціонарний)
2) не надходять до систему і не покидають її одночасно 2 чи більше вимог (потік стаціонарний)
3)
надходження однієї вимоги
не залежить від надходження іншої (відсутність післядії). Відомі також
інтенсивність ![]() надходження потоків вимог (середнє
число обслуговування за одиницю часу -
надходження потоків вимог (середнє
число обслуговування за одиницю часу - ![]() ). Потрібно визначити основні
характеристики системи, а саме:
). Потрібно визначити основні
характеристики системи, а саме:
- P – ймовірність простою каналу обслуговування
-
![]() - ймовірність того, що в системі
знаходяться n-вимог
- ймовірність того, що в системі
знаходяться n-вимог
-
![]() - середнє число вимог, що
знаходяться в системі
- середнє число вимог, що
знаходяться в системі
-
![]() - середнє число вимог, що
знаходяться в черзі
- середнє число вимог, що
знаходяться в черзі
-
![]() - середній час очікування вимог в
системі.
- середній час очікування вимог в
системі.
Потік вимог, що володіє якостями стаціонарності, ординарності та відсутністю післядії, називають простішим. В нашій задачі потік вимог простіший. Основним поняттям при аналізі процесу системи масового обслуговування є стан системи. Знаючи стан системи можна передбачити у ймовірностному сенсі її поведінку. Простіший потік – це стаціонарний Пуасоновський потік. Якщо всі потоки подій, що переводять систему із одного стану до іншого являються Пуасоновськими, то для цих системи ймовірність стану описується за допомогою систем звичайних диференційних рівнянь. В більшості задач не прикладного характеру заміна неПуасоновського потоку подій Пуасоновським з тими ж інтенсивностями призводить до отримання рішення, котре мало відрізняються від істинного, а іноді і зовсім не відрізняється. В якості критерію відмінності реального стаціонарного потоку від Пуасоновського можна розглядати близькість математичного очікування числа дисперсій подій, що надходять на визначеній ділянці часу в реальному потоці.
Існує визначений математичний прийом, що значно полегшує вивід диференційного рівняння для ймовірностного стану. Спочатку будується розмічений граф стану з показом можливих переходів. Це полегшує дослідження та робить його більш наглядним. Граф стану, на котрому проставлені не тільки стрілки переходів, але й інтенсивність відповідних потоків подій називають розміченим.
Закреслимо розмічений граф стану одноканальної розімкнутої системи масового обслуговування з очікуванням (рисунок 1.3):
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() ........
........
![]()
|
|
|
|
|
Рисунок 1.3
Якщо складений розмічений граф стану, то для побудови математичної моделі, тобто для складання системи звичайних диференційних рівнянь рекомендується використовувати наступні правила:
- Похідна ![]() ймовірності
перебування системі у стані n дорівнює алгебраїчній сумі наступних величин:
число величин цієї суми дорівнює числу стрілок на графі стану системи, що з’єднує
стан n з іншими станами.
ймовірності
перебування системі у стані n дорівнює алгебраїчній сумі наступних величин:
число величин цієї суми дорівнює числу стрілок на графі стану системи, що з’єднує
стан n з іншими станами.
- Якщо стрілка направлена в стан n, то відповідна величина береться зі знаком “+” .
- Якщо стрілка направлена зі стану n – то зі знаком “-“.
- Кожна величина суми дорівнює добутку ймовірностей того стану, з котрого направлена стрілка на інтенсивність потоку подій, що переводять систему по даній стрілці.
У відповідності з розміченим графом стану, використовуючи даний стан, запишемо систему звичайних диференційних рівнянь ймовірностей стану таким чином:
![]() ;
;
![]()
б) Дослідження математичної моделі.
Обмежемся дослідженням режиму роботи що встановився замкнутої одноканальної системи. Тоді:
![]() (n=0,1,...)
(n=0,1,...)
Дійсно, замість системи диференційних рівнянь отримуємо систему алгебраїчних рівнянь:
![]()
![]()
![]()
Використовуючи отриману систему алгебраїчних рівнянь легко виразити ймовірності стану системи у вигляді квадратної рекурентної формули . З першого рівняння визначається ймовірність присутності однієї вимоги в системі.
![]()
Із другого рівняння ймовірність присутності двох вимог в системі:
![]()
І в результаті отримуємо:
![]()
Аналогічно
проводиться перетворення для ![]()
![]()
![]()
І врешті
сумуємо отримані значення ![]() та знаходимо суму:
та знаходимо суму:
![]()
![]()
![]()
Використовуючи формулу геометричної прогресії отримуємо:
![]()
і при ![]()
![]() , сума:
, сума:
![]()
Звідки ми маємо:
1)
ймовірність простою каналу
обслуговування: ![]()
2)
знаходимо ймовірність
того, що в системі знаходиться ![]() вимог:
вимог:
![]()
3) середнє число вимог, що знаходяться в системі:
![]()
![]()
Остання дужка є похідною від наступного виразу:
![]()
![]() ,
,
тобто цей
вираз дорівнює: ![]()
В результаті
отримуємо: ![]()
4) Далі знаходимо середнє число вимог, що знаходяться в черзі:
![]()
5) Знаходимо середній час очікування вимоги в системі, котрий можливо визначити, знаючи середнє число вимог, що знаходяться в системі:
![]()
1.1.2.3 Задача аналізу замкнутої системи з очікуванням (потоки вимог Пуасоновські)
а) Постановка задачі.
Нехай
досліджується деяка система масового обслуговування з обмеженою кількістю вимог
в системі, тобто вимоги, що обслуговуються, знову повертаються в систему
обслуговування. Інтенсивність надходження однієї вимоги в систему відома і
дорівнює ![]() .
Інтенсивність обслуговування також відома та дорівнює
.
Інтенсивність обслуговування також відома та дорівнює ![]() . Число вимог, що потребують
обслуговування. дорівнює
. Число вимог, що потребують
обслуговування. дорівнює ![]() . Необхідно визначити основні
характеристики системи, а саме – ймовірність того, що в системі є
. Необхідно визначити основні
характеристики системи, а саме – ймовірність того, що в системі є ![]() вимог -
вимог - ![]() . Ймовірність
простою каналу обслуговування -
. Ймовірність
простою каналу обслуговування -![]() .Середнє число вимог, що
знаходяться в черзі -
.Середнє число вимог, що
знаходяться в черзі - ![]() . Середнє число вимог, що
знаходяться в системі -
. Середнє число вимог, що
знаходяться в системі -![]() . Середній час очікування в черзі
-
. Середній час очікування в черзі
- ![]() .
Середній час очікування вимоги в системі -
.
Середній час очікування вимоги в системі - ![]() .
.
Стан системи будемо пов’язувати з числом вимог, що знаходяться в системі. При цьому можливі два стани:
1)
число вимог, що поступили
в систему, дорівнює нулю ![]() ,тобто канали обслуговування
простоюють.
,тобто канали обслуговування
простоюють.
2)
число вимог , що поступили
в систему ![]() .
.
Закреслимо розмічений граф стану одноканальної замкнутої системи масового обслуговування з очікуванням(рисунок 1.4):
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Рисунок 1.4
б) Побудова математичної моделі.
У відповідності до розміченого графа стану та використовуючи правило Колмагорова, запишемо систему диференційних рівнянь для ймовірності стану:
![]() ;
;
![]()
![]()
Обмежемся дослідженням режиму роботи системи, що встановився. Тоді:
![]() ,
, ![]()
і замість системи звичайних диференційних рівнянь ми отримуємо систему алгебраїчних рівнянь:
![]()
![]()
Для ![]() неважко
отримати рекурентну формулу:
неважко
отримати рекурентну формулу:
![]() ; при
; при ![]()
![]() ; при
; при ![]()
![]()
![]() ;
;
Ймовірність
того, що в системі знаходиться ![]() вимог, складе:
вимог, складе:
![]()
Використовуючи рівність:
![]()
можна отримати
вираз для ![]() .
.
Ймовірність
простою каналу обслуговування ![]() буде дорівнювати:
буде дорівнювати:
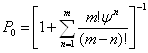
Середнє число вимог, що знаходяться в черзі, дорівнює:

Середній час очікування вимоги в черзі:

Середній час очікування вимоги в черзі:
 .
.
Як можна помітити, визначення основних характеристик одноканальних систем масового обслуговування вимагає великої обчислювальної роботи, в зв’язку з чим всі розрахунки робляться на комп’ютері.
1.2 Побудова моделей задач масового обслуговування (на прикладі роботи обчислювального центру (ОЦ))
1.2.1 Модель для імітації виробничої діяльності ОЦ
1.2.1.1 Завдання
Розробити модель для імітації виробничої діяльності ОЦ при планово-запобіжному обслуговуванні експлуатованого парку ЕОМ. По отриманій моделі оцінити розподіл випадковою змінною "число машин знаходяться на позаплановому ремонті".
ОЦ має в своєму складі парк ЕОМ, що забезпечує середню продуктивність і що базується на ЕОМ IBM PC з ЦП типу 386SX і 386DX. Окрім: цього на ОЦ використовуються як мережні сервери машини типу 486DX і Pentium, підтримуючі локальні сіті, в яких здійснюється складна цифрова обробка великих цифрових масивів інформації, окрім цього, розв'язуються задачі розробки кольорових зображень.
На ОЦ прийнято планово-профілактичне обслуговування. ОЦ з невеликим парком ЕОМ і тому ремонтом ЕОМ займається всього один радіо механік ( в термінах СМО - ремонтник). Це означає: що одночасно можна виконувати обслуговування тільки однієї ЕОМ. Всі ЕОМ повинні регулярно проходити профілактичний огляду. Число ЕОМ що піддається щоденному огляду згідно графіка, розподілено рівномірно і складає від 2 до 6. Час, необхідний для огляду і обслуговування кожної ЕОМ приблизно розподілено в інтервалі від 1, 5 до 2, 5 ч. За цей час необхідно перевірити саму ЕОМ, а також такі зовнішні пристрої як кольорові струменеві принтери, потребуючі в зміні або заправці картриджів фарбником. Декілька ЕОМ мають як зовнішні пристрої кольорові плоттери (графічні пристрої), у яких достатньо складний профілактичний огляд.
Робочий день ремонтника триває 8 ч, але можлива і багатозмінна робота.
В деяких випадках профілактичний огляд уривається для усунення раптових відмов мережних серверів, що працюють у три зміни, т. е 24 ч в доба. В цьому випадку поточна профілактична робота припиняється, і ремонтник починає без затримки ремонту серверу. Проте, машина-сервер, потребуюча в ремонті, не може витіснити іншу машину-сервер, вже що стоїть на позаплановому ремонті.
Розподіл часу між надходженнями машин-серверів є пуассоновським з середнім інтервалом рівним 48 ч. Якщо ремонтник відсутній у момент надходження ЕОМ ці ЕОМ повинні чекати до 8ч ранку. Час їх обслуговування розподілено по експоненті з середнім значення в 25 ч. Необхідно побудувати GPSS-модель для імітації виробничої діяльності ОЦ. По отриманій моделі необхідно оцінити розподіл випадкової змінної "число машин-серверів, що знаходяться на позаплановому ремонті". Виконати прогін моделі, що імітує роботу ОЦ в течії 25 днів, враховуючи проміжну інформацію після закінчення кожних п'яти днів. Для спрощення можна вважати, що ремонтник працює 8 ч в день без перерви, і не враховувати вихідні. Це аналогічно тому, що ОЦ працює 7 днів в тиждень.
1.2.1.2 Метод побудови моделі
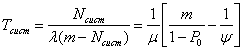
Розглянемо сегмент планового огляду ЕОМ (рисунок 1.5). Транзакти, підлягаючі плановому огляду, є користувачами обслуговуючого приладу (ремонтник), яким не дозволено його захоплення. Ці ЕВМ-транзакти проходять через перший сегмент моделі щодня з 8 ч ранку. ЕОМ-транзакт входить в цей сегмент. Після цього транзакт поступає в блок SPLIT, породжувати необхідне число транзактов, ЕОМ, що є, заплановані на цей день для огляду. Ці ЕВМ-транзакти проходять потім через послідовність блоків SEIZE-ADVANCE-RELEASE і покидають модель.
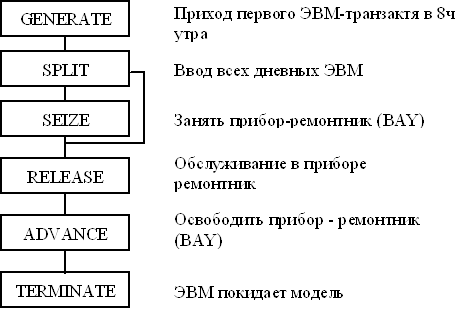
Рисунок 1.5 - Перший сегмент
Сегмент "позапланового ремонту" ЕОМ - сервери, потребуючий в позаплановому ремонті, рухаються в модель в своєму власному сегменті. Використовування ними приладу імітується простою послідовністю блоків PREEMPT-ADVANCE- RETURN. Блок PREEMPT підтверджує пріоритет обслуговування ЕОМ - серверу (в блоці в полі В не потрібен PR) (рисунок 1.6 )
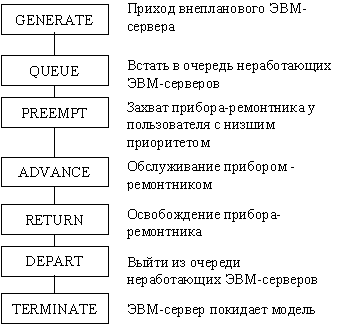
Рисунок 1.6 – Другий сегмент
Сегмент "почало і закінчення" робочого дня ОЦ. Для того, щоб організувати завершення поточного дня роботи ОЦ після закінчення кожного 8-ми ч дня і його початку в 8 ч ранки, використовується спеціальний сегмент. Транзакти - диспетчер входить в цей сегмент кожні 24 ч (починаючи з кінцем першого робочого дня), Цей транзакт, має в моделі вищий пріоритет, потім негайно поступає в PREEMPT, має в полі В символу PR. Диспетчеру, таким чином, дозволено захоплювати прилад-ремонтник незалежно від того, ким є поточний користувач (якщо він є). Далі, через 16 ч, диспетчер звільняє прилад-ремонтник, дозволяючи закінчити раніше перервану роботу (за наявності такої). (рисунок 1.7).
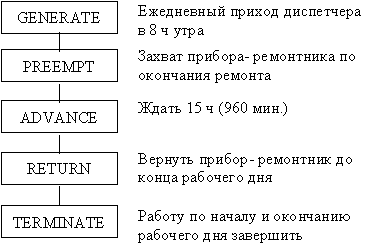
Рисунок 1.7 - Третій сегмент
Сегмент "збір даних для непрацюючих ЕОМ - серверів. Для збору даних, що дозволяють оцінити розподіл числа непрацюючих ЕОМ - приладів, використовується цей окремий сегмент. (рисунок 1.8)
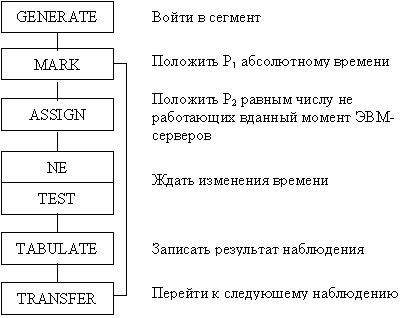
Рисунок 1.8 - Четвертий сегмент
Для цієї мети використовується зважені таблиці, які дозволяють вводити в них в один і той же момент часу спостережувані випадкові величини. Для цієї мети включаються два блоки - TABULATE, але якщо введення в таблицю випадкове (значення величин ³2), то цей підхід не годний. В цьому випадку використовується необов'язковий елемент операнд, званий ваговим чинником, означаючий число раз, яке величина, що підлягає табуляції, повинна вводиться в таблицю. Це дозволяє призначати різну вагу різним спостережуваним величинам.
Сегмент "проміжна видача" і закінчення моделювання в кінці дня використовується послідовність GENERATE-TERMINATE (рисунок 1.9).
Рисунок 1.9 - Сегмент таймеру
Розглянемо таблицю розподілу (Таблиця 1.1.)
Таблиця 1.1
| Оператори GPSS | Призначення |
| Транзакти: | |
| 1-ий сегмент | ЕОМ, призначена для планового профілактичного огляду |
| 2-ий сегмент | ЕОМ-сервер, потребуюча в позаплановому ремонті |
| 3-ий сегмент | Диспетчер, що відкриває в 8 ранку ОЦ и закриваючий його через 8 ч |
| 4-ий сегмент | Спостерігач, що стежить за вмістом черги для оцінки розподілу числа несправних ЕОМ -серверів: Р1 - параметр, в який заносяться відмітки часу Р2 - параметр, в який заноситься довжину черги |
| 5-ий сегмент | Транзакт, забезпечуючий проміжну видачу результатів |
| Прилади: | |
| BAY R | Ремонтник |
| Функції: | |
| JQBS | Описує рівномірне розподіл от 1 до 3; одержану величину можна інтерпретувати як число, на 1 менше числа ЕОМ, що прибувають щодня на плановий огляд |
| XPDIS | Експоненціальна функція розподіли |
| Черги: | |
| TRUBIL | ЕОМ - сервери яких коштують несправні |
| Таблиці: | |
| LENTH | Таблиця, в яку заносять число несправних ЕОМ - серверів |
В таблиці 1.1 за одиницю часу вибрано 1 хвилину.
Розглянемо програму моделі, складену на мові GPSS.
XPDIS FUNCTION RN1, C24
0, 0/. 1 . 104/. 2 . 222/. 3 . 355/. 4 . 509/. 5 . 69/. 6 . 915/. 7, 1. 2
, 75, 1. 38/. 8, 1. 6/. 84, 1. 85/. 88, 2. 12/. 9, 2. 3/. 92, 2. 52/. 94, 2. 81
. 95, 2. 99/. 96, 3. 2/. 97, 3. 5/. 98, 3. 9/. 99, 4. 6/. 995, 5. 3/. 998, 6. 2
. 999, 7/. 9998, 8
JOBS FUNCTION RN1, C2
0, 1/1, 4
LENTH TABLE P2. 0, 1, W6
* MODEL SEGMENT 1
1 GENERATE 1440, 1, 2
2 SPLIT FN$JOBS, NEXT1
3 NEXT1 SEIZE BAY
4 ADVANCE 120, 30
5 RELEASE BAY
6 TERMINATE
* MODEL SEGMENT 2
7 GENERATE 2880, FN$XPDIS, 2
8 QUEUE TRUBL
9 PREEMPT BAY
10 ADVANCE 150, FN$XPDIS
11 RETURN BAY
12 DEPART TRUBL
13 TERMINATE
* MODEL SEGMENT 3
14 GENERATE 1400, 481, 3
15 PREEMPT BAY, PR
16 ADVANCE 960
17 RETURN BAY
18 TERMINATE
* MODEL SEGMENT 4
19 TRANSFER, 1, 1, 2, F
20 WATCH MARK 1
21 ASSIGN 2, 0$TRUBL
22 TEST NE MP1, 0
23 TERMINATE LENTH, MP1
24 TRANSFER, WATCH
* MODEL SEGMENT 5
25 TRANSFER 7200. . 6241
26 TERMINATE 1
* CONTROL
START 5, 1, 1
END
1.2.1.3 Логіка роботи моделі
В моделі передбачається, що якийсь час, рівне одиниці, відповідає 8 ч ранки першого дня моделювання. Потім, перша (по рахунку) ЕОМ виділена диспетчером для планового огляду, входить в модель, вийшовши з GENERANE. Далі, кожна наступна перша ЕОМ, поступатиме в модель через 24 ч. ( блок 1, де операнд А=1440 ед. брешемо., т. е числу хвилин в 24 ч. Перша поява 5 диспетчера на ОЦ відбудеться у момент часу, рівний 481(блок 14). Це відповідає закінченню восьмої години. Другий раз диспетчер з'явиться через 24 години.
Транзакт забезпечуючи проміжну видачу: вперше з'явиться в час, рівний 6241, виходячи з блоку 25. Це число відповідає кінцю 8-ої години п'ятого дня моделювання. ( 24 х 4 = 96 ч, 96 + 8 = 104. 104 х 60 =6240, 6240 + 1 = 6241 ч). Наступний транзакт з'явиться через п'ять днів.
Блок 19 дозволяє вести моделювання до часу в 35041, що відповідає 25 дням плюс 8 ч, виражених в хвилинах.
Пріоритетна схема представлена в таблиці 1.2.
Таблиця 1.2
| Сегмент моделі | Інтерпретація транзактов | Рівень приоритету. |
| 3 | Диспетчер | 3 |
| 1 | ЕОМ, що прибувають на плановий огляд | 2 |
| 2 | Еом-сервер, що поступає на ремонт | 2 |
| 4 | Транзакт, спостерігаючий за чергою | 1 |
| 5 | Транзакти, забезпечуючі видачу на друк | 0 |
1.2.1.4 Результати моделювання
Отримана статистика черги Еом-серверів на ремонт показує, що на кінець 25 дня середнє очікування складає 595 одиниць часу, або близько 19 ч. В середньому 0,221 ЕОМ-сервер чекають обслуговування, і одночасно більш найбільший час 4 машини знаходяться в очікуванні. За 25 днів на позаплановий ремонт поступило 13 машин. . Таблична інформація указує, що 83% часу це були ЕОМ -сервери, чекаючі позапланового ремонту, 12% часу в очікуванні знаходилася одна машина, 4% - дві машини, і лише 0,52% і 0,05% часу одночасно чекали три і чотири машини. Для зручності результати зведені в таблиці 1.3.
Таблиця 1.3
| Число чекаючих ЕОМ | Час очікування в % |
| 0 машин | 83 |
| 1 машина | 12 |
| 2 машини | 4 |
| 3 машини | 0, 52 |
| 4 машини | 0, 05 |
2. Обслуговування жорстких дисків
2.1 Загальна частина
2.1.1 Огляд сучасних типів жорстких дисків
В сучасних обчислювальних комплексах все частіше і частіше надають найбільшу увагу засобам накопичення інформації, а саме - накопичувачам на жорстких магнітних дисках (або як їх ще називають „Вінчестери”).
Стандартний BIOS підтримує 2 накопичувачі на жорстких дисках (HDD), що підключаються до одного контролера (HDC). В XT типи дисків визначає BIOS контролера, в AT типи задаються в Setup і зберігаються в CMOS. Відповідність типів фізичним параметрам залежить від версії BIOS. Тип 47 (User type) дозволяє задати нестандартні параметри. При використовуванні дисків ESDI або SCSI в полі типу указується None.
Стандартна адресація даних на диску – тривимірна: циліндр - головка – сектор (CHS).
Обмеження стандартного BIOS (Normal disk) - 504 Мбайт: 1024 циліндри *16 головок * 63 сектори * 512 байт.
Обмеження розширеного BIOS (Lange disk) – 7,88 Гбайт: 1024 циліндри * 256 головок * 63 сектори * 512 байт.
Для IDE – дисків місткістю до 7,88 Гбайт може використовуватися лінійна адресація інформації на диску через логічну адресу блоку LBA (Logical Block Addressing) Mode, підтримувана новими версіями BIOS. Режим LBA підтримується не всіма моделями великих IDE – дисків. Деякі IDE – диски великої місткості допускають їх конфігурування у вигляді 2-х фізичних пристроїв (Master і Slave) половиною місткості для забезпечення сумісності із старими версіями BIOS. При цьому на їх IDE – шлейф другий фізичний пристрій підключати не можна.
SCSI – диски використовує LBA як внутрішню систему адресації, 32-бітова адреса логічного блоку (сектор в 512 байт) допускає місткість диска до 2 терабайт. SCSI-BIOS звичайно емулює тривимірну адресацію для сумісності із стандартними Ос.
Вибір режиму адресації великого диска в BIOS Setup повинен здійснюється з обліком з урахуванням можливостей вживаних ОС. Через специфікації LBA і Large Disk Mode, що не встояли, можлива несумісність дисків, розмічених на різних версіях BIOS.
За 14 років, що пройшли після появи перших жорстких дисків в персональних комп'ютерах, їх параметри зрадилися самі радикальним чином. Нижче перераховані самі вражаючі приклади.
Максимальна місткість збільшилася з 10 Мбайт для накопичувачів 5,25" повної висоти в 1982г. До 10 Гбайт і більш для накопичувачів навіть меншого розміру (формату 3,5" половинної висоти).
Швидкість передачі даних зросла з 85- 102 кбит/с в комп'ютері IBM XT в 1983г. До більш ніж 10 Мбіт/с в самих швидкодійних сучасних системах.
Середній час пошуку (average seek time) зменшився з 85 мс (накопичувач комп'ютера IBM XT, 1983г.) до менш ніж 8 мс в самих швидкодійних накопичувачах.
В 1982г. Накопичувач місткістю 10 М коштував близько 1500 доларів (150 доларів за мегабайт), а зараз "питома вартість" дисків складає менше 25 центів за мегабайт.
Сьогодні, коли на комп'ютерному ринку з'явилася така безліч фірм-виробників дуже складно зробити вибір. Продукція наступних фірм займає провідне місце на ринку.
Seagate. Вінчестери Seagate в даний час багато кого лякають своєю низькою надійністю. Проте, Seagate - перший виробник, хто став використовувати рідинні підшипники в своїх IDE-моделях, довівши швидкість обертання шпинделя до 7200 оборотів в хвилину. Тобто, як і якийсь час тому назад при випуску Seagate Medalist Pro, - це одні з найшвидших дисків.
Western Digital. Фірма Western Digital, не так давно підірвавши свою репутацію випуском великої кількості дисків з помилками в Firmware, що приводило до їх передчасної загибелі, в даний час випускає цілком добротні і середні в доброму значенні цього слова вінчестери. І хоча нові моделі вже давно не випускалися, фірма продовжує розвивати свою лінійку. Головне, через що в даний час диски WD користуються попитом - це їх біс проблемна робота при частоті шини 83/133 Мгц.
Quantum. Компанія Quantum за останній час випустила декілька серій жорстких дисків (Fireball ST, SE і EL), безперервно збільшуючи густину запису. Це приводить до неухильного зростання продуктивності і тому, що на ринку присутній по декілька моделей жорстких дисків цієї фірми. Причому, останні моделі серії EL, хоча і мають швидкість обертання шпинделя 5400, по швидкості наближаються до лідерів з 7200 оборотами шпинделя в хвилину завдяки дуже високій густині запису. В цій новій серії фірма Quantum також переробила дизайн корпусу, який став значно акуратнішим.
Maxtor. Якийсь час тому назад, жорсткі диски фірми Maxtor були одними з найпопулярніших і одними з найшвидших. Правда, потім вони практично зникли з нашого ринку, проте тепер знову почали на нього повертатися "швидкими і безшумними", як було сказане в рекламі Maxtor на Комтеке. Дійсно, нові моделі цих вінчестерів, наприклад, Maxtor 90840D6, показують непогані результати.
IBM. Придбаваючи все велику популярність жорсткі диски фірми IBM, що проводяться одним з підрозділів голубого гіганта, з моменту їх появи на нашому ринку весь час знаходяться на "передньому краю". Високі швидкісні показники як і старої лінії DHEA (Hercules+), так і нових DTTA (Titan), забезпечуються застосуванням в них нових технологій. В останніх вінчестерах від IBM встановлюються GMR-головки (наступне покоління магниторезистивных головок) і деякі з них володіють швидкістю обертання шпинделя 7200 оборотів в хвилину. Не дивлячись на те, що серія DHEA (Deskstar 5, 8) проводиться в Угорщині, вінчестери від IBM вважаються також одними з найнадійніших. До речі, нові диски серії Titan (Deskstar 14, 16) почали виготовлятися безпосередньо в Японії. Єдина неприємність, яка може зустрітися при використовуванні IBM DTTA-371440 - 14-гігабайтного монстра, першого IDE-диска з такими тактико-технічними показниками, це нерозуміння його операційною системою. Річ у тому, що існуючими версіями DOS і Windows не підтримуються жорсткі диски більше 8,4 Гбайт. Тому, для його використовування треба ставити або Disk Manager, або Windows 98. Втім, це не так і жахливо.
Fujitsu. Представлені на ринку моделі вінчестерів IDE фірми Fujitsu не відрізняються особливою новизною, а отже і швидкістю, але заслужено зарекомендували себе достатньо стабільною і надійною роботою. Останнім часом цей виробник зосередився на магнітооптичних накопичувачах, тому модельний ряд IDE-жорстких дисків давно не обновляється. Проте, дуже багато хто використовує диски Fujitsu через низький відсоток браку і щодо високої надійності.
2.1.2 Призначення і область застосування
Під накопичувачем інформації розуміється сам пристрій запису, зберігання і відтворення інформації, а носій інформації – це предмет, на який проводиться запис інформації. Накопичувач на жорстких магнітних дисках призначений для тривалого зберігання, читання, записи даних. Жорсткий диск є одним з важливих частин персонального комп'ютера. Існування сучасних персональних ЕОМ без вінчестера неможливо представити. Область застосування накопичувача надзвичайно широка.
2.1.3 Технічні характеристики
Особливість конструкції у винчестерных НМД є нероздільне конструктивне виконання основних взаємодіючих вузлів: блоку магнітних головок з механізмом позиціонування і магнітного диска. Така конструкція забезпечує високу точність позиціонування і малі (0,5 мкм) зазори між поверхнею циліндра і головкою. Весь блок розміщується в корпусі, що герметизується, з фільтрацією повітря до частинок не більше 0,3 мкм.
Що випускаються в даний час винчестерні НМД мають малі габарити, широкий діапазон об'єму, швидкість обміну і вартість, можуть практично задовольнити запити будь-якої системи.
Розроблені спочатку для крупних ЕОМ, останніми роками ці НМД сталі популярними як ВЗП для міні - ЕОМ. Цьому неабиякою мірою сприяло зменшення габаритних розмірів пристроїв при збереженні високих технологічних параметрів.
Розглянемо параметри, яки характеризують накопичувачі на жорстких магнітних дисках. Швидкодію накопичувачів можна оцінити по декількох параметрах.
Середній час пошуку. Під середнім часом пошуку (вимірюється в мілісекундах) розуміється середньостатистичний час, протягом якого магнітні головки (конкретного типу носіїв) переміщаються з одного циліндра на іншій. Як середній час пошуку в паспортних даних накопичувача часто указують часовий інтервал, необхідний для переміщення магнітних головок на відстань, рівну одній третині ширини зони запису даних на диску. Середній час пошуку залежить, головним чином, від конструкції механізму приводу головок.
Середній час доступу. Відмінність від середнього часу пошуку полягає в тому, що враховується запізнювання (середній час) при переміщенні магнітної головки до шуканого сектора на доріжці. Величина запізнювання рівна половині періоду обертання диска. Таким чином, середній час доступу рівно сумі середнього часу пошуку і часу запізнювання. Із зростанням швидкості обертання дисків не тільки зменшується запізнювання, але і зростає швидкість передачі даних.
Швидкість передачі даних. Швидкість передачі даних є інтегральною характеристикою при оцінці загальної продуктивності комп'ютера і залежить від характеристик елементів конструкції термоблоку накопичувача і параметрів контролера.
Час безвідмовної роботи. В описах накопичувачів указується такий параметр, як середньостатистичний час між збоями, характеризуюче надійність
пристрої. Значення цього параметра звичайно коливається від 20 000 до 50000 ч., але може складати і 1млн ч. Ці значення є розрахунковими з відомою вірогідністю, а для отримання статистично достовірних даних про надійність пристрою необхідно протестувати групу однакових накопичувачів і підрахувати кількість відмов за час, як мінімум в два рази перевищуюче очікуване значення середньостатистичного часу між збоями. Цей показник далеко не завжди відповідає реальній надійності пристрою.
Місткість накопичувача. В даний час більшість фірм виробників IDE- і SCSI- накопичувачів указує в паспортних даних форматовану місткість, оскільки жорсткі магнітні диски випускаються тими, що вже відформатували. Ця величина відрізняється від неформатованої місткості накопичувача. Як правило, об'єм пам'яті вимірюється в двійкових одиницях, а місткість накопичувача – в десяткових або в двійкових одиницях.
Вартість накопичувачів. Відношення місткість/вартість накопичувачів продовжує знижуватися у міру розвитку технології створення магнітних дисків.
2.1.4 Опис структурної схеми
2.1.4.1 Фізичний принцип роботи пристрою
Робота накопичувачів на жорстких і гнучких магнітних дисках ґрунтується на тому загальновідомому факті, що при пропусканні через провідник електричного струму навкруги нього утворюється магнітне поле. Це поле впливає на що опинилося в ньому феромагнітну речовину (носій). При зміні напрямі струму полярність магнітного поля також змінюється. Справедливо і зворотне твердження: при дії на провідник змінного магнітного поля в ньому виникає електричний струм. При зміні полярності магнітного поля змінюється і напрям електричного струму. Завдяки такій взаємній "симетрії" електричного струму і магнітного поля з'являється можливість записувати дані на магнітні носії, потім їх прочитувати.
Головка запису/відтворення в будь-якому дисковому накопичувачі складається з U – образного сердечника з феромагнітного матеріалу і намотаної на ньому обмотки, по якій може протікати електричний струм. При пропусканні струму через обмотку в сердечнику (магнітопроводі) головці створюється магнітне поле. При перемиканні напряму протікаючого струму полярність поля також змінюється.
Магнітне поле, наведене в сердечнику, частково розповсюджується в оточуюче простір дякуючи наявності зазора "пропиляного" в підставі букви U. Якщо поблизу зазора розташовується інший феромагнетик (робочий шар носія), те магнітне поле локалізується в ньому, оскільки подібні речовини володіють меншим магнітним опором, ніж повітря. Магнітний потік, перетинаючий зазор, замикається через носій, що приводить до поляризации його магнітних частинок (доменів) у напрямі дії поля. Напрям поля і, отже, залишкова намагніченість носія залежить від полярність електричного струму в обмотці головки. Жорсткі магнітні диски звичайно робляться на алюмінієвій або скляній підкладці, на який наноситься шар феромагнітного матеріалу. Робочий шар, в основному, складається з окислу заліза з різними добавками. Магнітні поля, створювані окремими доменами на чистому диску орієнтовані випадковим чином і взаємно компенсуються на будь-кому скільки-небудь протяжній (макроскопічному) ділянці поверхні диска, тому його залишкова намагніченість рівна нулю. Якщо ділянка поверхні диска при проходженні поблизу зазора головки піддається дія, домени шикуються в певному напрямі, і їх магнітні поля більше не компенсують один одного.
В результаті у цієї ділянки диска з'являється залишкова намагніченість, яку можна згодом знайти. Виражаючись науковою мовою, залишковий магнітний потік, формований даною ділянкою поверхні диска, стає відмінним від нуля.
Зі всього вищесказаного можна зробити висновок: в результаті протікання змінного струму імпульсної форми в обмотці головки запису/відтворення на диску, що обертається, утворюється послідовність ділянок з різної по знаку (напряму) залишкової намагніченості. Найважливішими з погляду подальшого відтворення записаної інформації виявляються ті зони, в яких відбувається зміна напряму залишкового магнітного поля, або просто зони зміни знака (flux transition). При записі кожного біта на диску формується послідовність ділянок з різною намагніченістю, і, відповідно, певним розташуванням зон зміни знака. Ділянка доріжки запису, на якій може бути записаний одна зона зміни знака називається осередком переходів (transition сеll) або просто бітовим осередком. Геометричні розміри такого осередку залежать від тактової частоти сигналу запису і швидкості, з якою переміщаються один щодо одного головка і поверхня диска. При записі окремих бітів даних або груп в осередках формується характерний "узор" із зон зміни знака, залежний від способу зберігання інформації. Це зв'язано з тим, що в процесі перенесення даних на магнітний носій кожний біт (або група бітів) за допомогою спеціального кодуючого пристрою перетвориться в серію електричних сигналів, що не є точною копією послідовності імпульсів.
При відтворенні записаних даних мають значення зони переходу між ділянками поверхні диска з різною залишковою намагніченістю. Зв'язаний це з тим, що по законах електромагнітної індукції ЕДС в контурі (в даному випадку — в обмотці головки) виникає тільки при зміні магнітного потоку, що перетинає контур. Це означає, що при русі головки уздовж ділянки з постійною намагніченістю напруги на її виходах не буде. Оскільки сигнал запису представляє з себе прямокутні імпульси, та напруга на виході головки запису/відтворення матиме вид коротких різнополярних викидів, що виникають в ті моменти, коли вона перетинає зону зміни знака. Полярність цих викидів залежить від того, в якому напрямі міняється намагніченість - від умовно позитивного рівня до негативного або навпаки. Амплітуда сигналу, що поступає з головки пі прочитуванні, дуже мала, тому питання про шуми і перешкоди стоїть вельми гостро. Для його посилення використовуються високочутливі пристрої, що входять до складу дисководів. Після посилення сигнал поступає на декодуючі схема, які призначені для відновлення даних, ідентичного тому, що поступав на накопичувач при проведенні запису.
2.1.4.2 Огляд фізичних методів зберігання інформації на магнітних носіях
На сьогоднішній день застосовують досить широкий спектр методів зберігання інформації на магнітних дисках, деякі методи морально застаріли, але дотепер використовуються в сполучи з IBM PC XT.
Метод MFM (Modified Frequency Modulation - модифікована частотна модуляція) використовується для запису на гнучкі диски, а також - в ранніх вінчестерах для PC XT. при використовуванні цього методу на одну доріжку вінчестера записується 17 секторів по 512 байт кожний.
Метод RLL (Run Length Limited - обмежена довжина серії) використовує більш щільну упаковку даних при записі, підвищуючи об'єм інформації на доріжці приблизно на 50%. Кодування проводиться так, щоб довжина серії нулів не виходила за межі заданих параметрів; звичайно мінімум рівний двом, а максимум - семи. Відповідно, метод часто позначається як RLL (2,7), а доріжку записується до 27 секторів.
Метод ARLL (Advanced RLL - поліпшений RLL) - подальший розвиток RLL у бік підвищення густини упаковки. Звичайно застосовується з параметрами (1,7) і (3,9), а доріжку записується 34 і більш сектори. Більшість сучасних вінчестерів використовує методи RLL або ARLL.
Метод ZBR (Zoned Bit Recording - зоновий запис бітів) - метод упаковки даних на доріжках диска. На відміну від перерахованих вище методів фізичного запису, ZBR є більш високорівневим методом і використовується в комбінації з одним з них, завдяки тому, що лінійна швидкість поверхні щодо головки на зовнішніх циліндрах вище, ніж на внутрішніх, біти на зовнішніх циліндрах записуються з більшою частотою (отже - густиною), ніж всередині. Звичайно на поверхні організовується до десятка і більш зон, усередині яких густина запису однакова.
При використовуванні ZBR геометрія диска стає неоднорідною зовнішні циліндри містять більше секторів, ніж внутрішні; по цьому на таких дисках використовується так звана умовна, або логічна геометрія, коли адреси логічних секторів перетворяться у фізичні внутрішнім контролером диска за допомогою спеціальних таблиць.
Перемикання режиму накопичувача здійснюється перемичкою, причому першим логічним диском є MASTER. Інтерфейс IDE AT підтримує тільки програмне уведення-виведення з використанням апаратного переривання IRQ14. Фізично інтерфейс реалізований у вигляді плоского 40-контактного кабелю, довжини, що рекомендується, 50 см.
2.1.4.3 Структурна схема пристрою
Призначення складових частин. Принцип роботи
жорсткий диск інформація пристрій
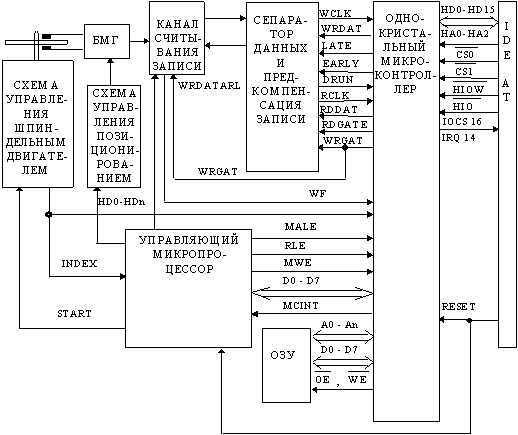
Рисунок 2.1 - Структурна схема НЖМД IDE AT.
INDEX - сигнал виробляється схемою управління двигуна шпінделя за один оборот диска;
START - дозвіл на запуск двигуна шпінделя;
HD0-HDn - двійковий код вибору головки прочитування/запису;
RDDATARLL - дані читання RLL;
WRDATARLL - дані записи RLL;
WF - сигнал виробляється схемою запису при помилці;
WCLK - синхроімпульси записуваних даних;
WRDATA - дані записи в коді NRZ;
LATE, EARLY - сигнали управління режимом предкомпенсации;
DRUN - вихід детектора поля синхронізації;
RCLK - синхроімпульси прочитуваних даних;
RDDATA - прочитувані дані в коді NRZ:
RDGATE - строб читання;
WRGATE - строб запису;
MALE-строб адреси управляючого мікропроцесора;
MRE - стоб читання управляючого мікропроцесора:
MWE - стоб записи управляючого мікропроцесора;
DO-D7 - внутрішня шина даних накопичувача;
MCINT - сигнал переривання від однокристального мікроконтролера;
/ОЄ - строб читання для буферного ОЗУ;
/WE - строб запису для буферного ОЗУ;
HDO-HD15, НАО-НА2 /CS0 /CSI /HIOW /HIOR /IOCS16, IRQ14, RESET - інтерфейсні сигнали.
Схема управління двигуном шпинделя. Двигун шпинделя НЖМД IDE AT як правило трифазний, це забезпечує більш стабільну швидкість обертання, що особливо важливо при підвищеній густині запису. З цієї ж причини у таких двигунів, як правило, три датчики Холу, що дозволяє мікросхемі управління двигуном шпінделя точніше підстроювати швидкість обертання диска. Більш високі вимоги до схеми управління двигуном шпінделя зв'язані не тільки з підвищеною густиною запису НЖМД IDE AT, але і з тим, що такі НЖМД мають малі габарити, в них застосовують 3-х дюймові диски, через це механічна система шпиндель-магнитні диски має невелику інерційність, що з одного боку, дозволяє більш швидше розкручувати і зупиняти магнітні диски, але з іншою така механічна система сильніше схильна детонації. В більшості накопичувачів, з соленойдным приводом магнітних головок, для забезпечення зворотного зв'язку мікросхеми управління двигуном шпінделя і самим двигуном шпінделя замість датчиків Холу використовується вбудована сервісна інформація вона використовується не тільки для позиціонування магнітних головок, але і для стабілізації швидкості обертання двигуна шпінделя. В таких НЖМД при подачі живлячої напруги двигун шпінделя розкручується у форсованому режимі без аналізу швидкості обертання магнітних дисків. Після цього спеціальна схема, з формату сервісної інформації, виділяє импульсы-сервометки, які подаються на мікросхему управління двигуном шпінделя, по цих імпульсах і відбувається подальша стабілізація швидкості обертання. Відмітною особливістю таких накопичувачів є наявність всього трьох провідників (фаз управління), що йдуть до двигуна шпінделя. В перших моделях НЖМД IDE AT швидкість обертання магнітних дисків складала, як правило 16,6 мс в сучасних моделях НЖМД, при застосуванні високопродуктивних однокристальних контролерів, для підвищення швидкості обміну, швидкість обертання значно збільшена і досягає 8 мс в 1 Гбайтних моделях.
Практично у всіх моделях НЖМД IDE AT дозвіл на запуск двигуна подається з управляючого мікропроцесора, після його ініціалізації, тому двигун шпінделя може зупинятися при появі інтерфейсного сигналу RESET, більш в деяких накопичувачах фірми Seagate запуск двигуна шпінделя проводиться тільки після повної внутрішньої діагностики накопичувача.
Схема управління позиціонуванням. В НЖМД IDE AT застосовують систему позиціонування, як з кроковим двигуном, так і з соленоидным приводом (звуковою котушкою), причому останнім часом система позиціонування з соленоидным приводом практично повністю витіснила систему позиціонування з кроковим двигуном. Це зв'язаний, перш за все, з такою характеристикою НЖМД, як середній час доступу. Другою причиною є все густина запису, що збільшується, за рахунок збільшення кількості циліндрів на робочій поверхні і як наслідок зменшення відстані між двома сусідніми доріжками. В сучасних НЖМД застосовують системи збалансованого ротаційного позиціонування, які більш надійні і займають значно менше місця в порівнянні з лінійними, що використовуються на перших моделях НЖМД. В накопичувачах з соленоидным двигуном, для розміщення сервісної інформації (необхідної для позиціонування магнітних головок) використовується два типи СІ:
СІ на окремій (виділеної) поверхні (dedicated surfase);
Вбудована СІ (embedded).
Остання у свою чергу підрозділяється на СІ розташовану між секторами і СІ вбудовану у формат. До першої відносяться такі моделі, в яких кількість сервометок на доріжці точно відповідає кількості секторів накопичувача і розташовані вони строго між секторами. Причому кількість сервоміток на доріжці міняється відповідно до зонного розподілу. В більш сучасних накопичувачах використовується СІ вбудована у формат. При цьому кількість сервометок на всіх доріжках однаково і рівно. В таких накопичувачах формат не прив'язаний до сервометкам і доріжку можна відформатувати на різну кількість секторів. Причому коли зустрічається сервометка, фізичний формат уривається (навіть якщо зустрічається поле даних) і продовжується тільки після її ідентифікації.
По-перше НЖМД IDЕ АТ з кроковим двигуном використовувалося звичайне фазове управління кроковим двигуном яке полягає в тому, що для переміщення на задану доріжку до фаз крокового двигуна необхідно прикласти послідовно дискретні напруги, при цьому вал двигуна провернеться на заданим кут. Ніякого зворотного зв'язку про положення головок така система не мала і місткості накопичувачів які використовували такий принцип позиціонування не перевищувала 40 Мбайт.
В більш пізніх НЖМД з кроковим двигуном сталі використовувати широтно-імпульсне фазове управління. В таких накопичувачах застосовується вбудований сервоформат і тому вони займають проміжне положення між накопичувачами з кроковим двигуном і накопичувачами з соленоидным приводом. Ідея широтно-імпульсного фазового управління полягає в наступному: після переміщення магнітних головок на задану доріжку відбувається підстроювання крокового двигуна на максимальну амплітуду ліченої сервісної інформації і лише після цього відбувається прочитування або запис даних. Для переміщення магнітних головок на один циліндр управляючий мікропроцесор подає на контролер ШИФУ код m, що приводить до переміщення МГ приблизно на один циліндр, після цього мікропроцесор прочитує код n з схеми виділення сервометок і порівнює цей код з еталонним значенням. При неспівпаданні коду (унаслідок зсуву з доріжки) проводиться коректування коду m і процес повторюється.
Системи управління з соленоидным двигуном (звуковою катушкою) є найскладнішими, але завдяки появі однокристальних сервомодуляторов стало можливим використовування соленоидного приводу в недорогих, масових моделях НЖМД. В даний час практично всі виробники накопичувачів сталі використовувати саме соленоидный двигун для систем позиціонування.
Принцип побудови системи з виділеною сервоповерхностью полягає в наступному: При виготовленні гермоблока накопичувача на одну з поверхонь (звичайно це сама нижня поверхня пакету дисків) записується спеціальна сервісна інформація. Магнітна головка, яка працює тільки на читання, постійно прочитує сервісну інформацію. СІ посилена і відфільтрована поступає в серводемодулятор, де розшифровується і потім визначається дійсне положення блоку магнітних головок. На підставі отриманої інформації подається дія на пристрій управління соленоидным двигуном. Таким чином здійснюється стеження за допомогою пристрою тонкого регулювання. Інша задача системи позиціонування полягає в створенні струмового імпульсу, у кожному конкретному випадку при переході за межі доріжки. Ініціатором такого імпульсу є управляючий мікропроцесор, який указує сервоконтроллеру номер необхідної доріжки. На підставі цього сервоконтроллер передає код необхідного струмового імпульсу в схему управління позиціонуванням, де за допомогою ЦАП формується його точна величина.
Для переміщення на задану доріжку схема управління позиціонуванням повинна сформувати струмовий імпульс. Після переміщення включається система тонкого регулювання, для точного підстроювання на доріжку.
В залежності від довгі переміщення вводиться поняття класу позиціонування по яких формуються струмові імпульси переміщення. Чим більше класів позиціонування у накопичувача тим швидше накопичувач знаходить потрібну доріжку. В сучасних накопичувачах кількість класів позиціонування рівно кількості серводорожек накопичувача - при цьому кожній довжині переміщення відповідає свій певний струмовий імпульс.
Абсолютно іншим способом розміщується сервоинформация при використовуванні принципу «Embedded servo». При виготовленні гермоблока сервісна інформація записується на кожній робочій поверхні - мітками. Як стандартне виконання широко застосовується формат «микро-магнум».
Сервосистема працює подібно системі з виділеною сервоповерхностью. Відмінності полягають в тому. що сервісна інформація, що знаходиться між секторами, виділяється з потоку даних накопичувача і поступає порціями. Тому після переміщення на необхідний циліндр ( навіть при перемиканні головки) необхідно пропустити декілька секторів для точного підстроювання на доріжку. При виконанні операції запису/читання, для того, щоб не була затерта сервометка. сигнал запису в канал поступає від сервоконтроллера тільки після того. як повністю лічена і ідентифікована сервометка. При її читанні сервоконтроллер формує секторні імпульси SEC/DR UN які поступають на однокристальний мікроконтролер.
Канал прочитування/запису. Важливою особливістю сучасних HDD є застосування зонно-секційного запису (ZBR), при якому весь дисковий простір розбивається на зони і в кожній зоні записується певна кількість секторів на доріжку. Кількість зон на 3-х дюймових магнітних дисках може досягати 20, а кількість секторів в зонах, залежно від місткості, коливається від 90- 140 в найпершій зоні і плавно зменшується до останньої, де може досягати 40 - 70. Такий метод ще називають методом з постійною густиною запису. Природно що канал прочитування/запису такого накопичувача повинен працювати : на різних частотах, при цьому перша зона працює на найвищій частоті і забезпечує найбільшу швидкість прочитування даних. Для корекції частотної характеристики каналу в таких накопичувачах використовують перебудовувані цифрові фільтри. В НЖМД IDE AT застосовують процесори читання даних з АРУ, підтримуючі кодування RI.L. Як комутатори попередніх підсилювачів читання/запису для феритових МГ застосовують добре що зарекомендували себе мікросхеми 32R117, 32R510, 32R4610, для тонкопленочных МГ - 32R520, 32R522, 32R2020 і ін.
Сепаратор даних і предкомпенсация запису. Сепаратора даних і схему предкомпенсации записи дуже часто роблять на одному кристалі, хоча між собою вони практично не зв'язані і функционнруют абсолютно роздільно. Основне призначення сепаратора даних полягає в очищенні цифрового сигналу від шумів при читанні і виділенні сигналів синхронізації RCLK.
Однокристальний мікроконтролер. Однокристальний мікроконтролер є найскладнішим елементом НЖМД IDE AT і є визначаючим в швидкості обміну даними між НЖМД і HOST.
Мікроконтролер має чотири порти, за допомогою яких він підключається до HOST, локальному мікропроцесору, RAM буферу і каналу обміну даними з НЖМД. Мікроконтролер є кінцевим автоматом керованим з боку локального мікропроцесора, з боку HOST доступні тільки стандартні регістри файлу завдання. Програмування однокристального мікроконтролера проводитися на етапі ініціалізації з боку локального мікропроцесора при цьому відбувається настройка на один з трьох методів кодування MFM, RLL або NRZ. вибирається режим CRC або ЕСС, встановлюється режим гнучкого або жорсткого розбиття на сектори (гнучким режим використовується в НЖМД IDE AT із зонно-секційним записом).
Контролер управління НЖМД є найскладнішою частиною однокристального мікроконтролера і є кінцевим автоматом, що виконує функції: - пошук адресного маркера: - читання сектора: - читання всіх секторів на доріжці: - запис сектора: - запис всіх секторів на доріжці: - запис ідентифікатора: - форматування одного сектора; - форматування доріжки. Управління контролером НЖМД здійснюється за допомогою регістрів управління, доступних з боку локального мікропроцесора.
Інтерфейс IDE AT. Організація інтерфейсу IDE AT.
Термін IDE (Imbedded Drive Electronics) - визначає будь-який інтерфейс системного рівня, абревіатура AT означає, що системою є комп'ютер IBM AT або сумісний з ним. Інтерфейс IDE був прекладен в 1988 р. для користувачів комп'ютерів IBM PC/XT і AT. Відмітною особливістю цього інтерфейсу є реалізація функцій контролера на платні НЖМД. Не дивлячись на широке використовування цього інтерфейсу в комп'ютерах IBM AT, стандартизован він тільки в 1990 р. під назвою АТА (ANSI ХЗТ9.2/90-143). В даному додатку описуються основні команди інтерфейсу АТА, окрім них стандарт АТА містить ряд додаткових команд використовуються не всіма HDD: - мультисекторные команди передачі даних Read Multiple, Write Multiple, Set Multiple: - команди передачі даних в режимі DMA Read DMA, Write DMA: - енергозберігаючі команди (Power Mode) - Sleep, Idle, Standby, Idle lmnaediate. Standby Immediate: - команди настройки режимів роботи накопичувача (Set Features). Платня, яка включається між системною шиною комп'ютера і НЖМД, виконує функції дешифратора базових адрес контролера і формувача інтерфейсних сигналів. В стандарті IDE AT можуть бути підключений два НЖМД, MASTER і SLAVE.
2.2 Спеціальна частина
Для підвищення надійності роботи електронно-обчислювальної апаратури і запобігання розповсюдження помилки в обчислювальному процесі системи забезпечуються системами контролю і діагностики.
2.2.1 Схема контролю призначена для виявлення факту помилки і місця помилки.
Схема контролю діагностики – для з'ясування причини помилки і виправлення помилки.
В сучасних ЕОМ існують комплексні системи контролю і діагностики, які виконують вказані функції. Для огляду цих систем контролю відрекомендуємо їх виді чотирьох рівнів: логічного, функціонального, системного і призначеного для користувача. Кожному рівню відповідають свої методи і засоби контролю.
На логічному рівні використовуються наступні методи контролю:
- З використанням надмірних кодів.
- Контроль по паритету (контроль з перевіркою парності).
- Контроль за кодом Хеммінга.
- Циклічний контроль.
- Контроль з використанням схемної (апаратної) надмірності.
- Контроль по збігу
- Контроль дублюванням
- Контроль з використанням мажоритарної логіки.
- Контроль з використанням особливостей вихідного коду.
Контроль на логічному рівні виконується апаратним способом.
Достоїнства:
- Безперервно стежить за обчислювальним процесом не знижуючи швидкодії.
- Не займає машинний час.
- Не зменшує область пам'яті для користувача.
Недолік:
- Витрати на реалізацію, тобто надмірність ваги, габаритів і вартості.
На функціональному рівні використовуються програмні методи контролю. Це або контрольні команди в робочій програмі, або контрольні програми в робочій Ос, або спеціальні тест мониторние Ос. Програмні методи контролю не вимагають витрат устаткування, але займають пам'ять для зберігання контрольних програм і приводять до витрат машинного часу.
На системному рівні використовуються контроль за допомогою можливостей Ос:
- системи резервування дисків;
- системи захисту пам'яті від несанкціонованого доступу;
- контроль звернення до неіснуючого елемента пам'яті.
Для МПУ на системному рівні використовуються охоронні таймери або охоронні процесори.
На призначеному для користувача рівні використовуються наступні методи контролю:
- Метод подвійного рахунку з порівнянням результатів.
- Реверсивний контроль. Полягає в тому, що за наслідками роботи програми визначаються початкові дані, які порівнюються з даними.
- Контроль за допомогою усіченого алгоритму.
2.2.2 Опис структурної схеми контролю. Принцип роботи
Для контролю шини даних вінчестера використовується схема контролю за кодом Хеммінга.
Код Хеммінга — це надмірний корегуючий код, що має наступні особливості:
1) застосовується при паралельній передачі інформації (наприклад між ОЗУ (пристрій, що оперативне запам'ятовує) і мікропроцесором, ОЗУ і накопичувачем на жорстких магнітних дисках);
2) не тільки знаходить, але і виправляє помилку (код Хеммінга виправляє тільки одиночну помилку, а у разі багатократної помилки дозволяє лише зафіксувати її);
3) має здатність, що високу знаходить;
4) має декілька контрольних розрядів на одне слово інформації (на 8 біт – 4 контрольні розряди, на 16 біт – і вони упроваджуються в інформаційне слово.
Алгоритм кодування. По заданому числу інформаційних розрядів (n) визначається з таблиці 1 число контрольних (k) розрядів.
Визначаються позиції контрольних розрядів в кодованому слові, т. е. контрольні розряди в кодованому слові займають позиції рівні ступеням двійки (20, 21, 22, 23, 24).
Будується розрядна сітка вихідного регістра.
Визначається зміст контрольних розрядів за наступними правилами:
Значення першого розряду визначається як сума по модулю 2 тих інформаційних розрядів в двійковому коді номерів, яких одиниця присутня в першому розряді.
Значення другого розряду визначається як сума по модулю 2 тих інформаційних розрядів в двійковому коді номерів, яких одиниця присутня в другому розряді.
Значення третього розряду визначається як сума по модулю 2 тих інформаційних розрядів в двійковому коді номерів, яких одиниця присутня в третьому розряді.
Значення четвертого розряду визначається як сума по модулю 2 тих інформаційних розрядів в двійковому коді номерів, яких одиниця присутня в четвертому розряді.
Значення п'ятого розряду визначається як сума по модулю 2 тих інформаційних розрядів в двійковому коді номерів, яких одиниця присутня в п'ятому розряді.
При кодуванні інформаційного слова 1,2,4,8,16 розряди не враховуються.
Алгоритм декодування.
Прийняте двійкове число записується у вхідний регістр розрядністю n+k.
Визначається парність контрольних груп (по формулах таблиці 3). При підрахунку ознак парності враховуються всі розряди, включаючи 1,2,4,8,16. Отримані ознаки парності є розрядами корегуючого числа, причому перший контрольний розряд утворює молодший розряд корегуючого числа.
Виконується аналіз отриманого корегуючого числа. Якщо корегуюче число рівно нулю — помилки немає, якщо не рівно нулю, то двійковий код корегуючого числа є номером помилкового розряду, але якщо двійковий код корегуючого числа більше максимального номера розряду — помилка в декількох розрядах.
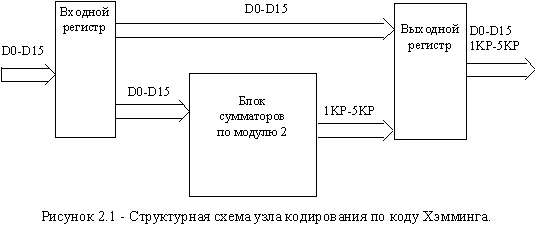
Вхідний регістр представляє з себе буфер і призначений в основному для підтримки логічних рівнів напруги в заданих межах.
Блок суматорів по модулю 2 є кодуючим пристроєм, перетворююче інформаційне слово в корегуюче по алгоритмах описаних вище. Містить п'ять суматорів по модулю 2 здійснюючої функції описані в таблиці 2.
Вихідний регістр окрім буферних функцій також виконує об'єднання контрольних розрядів і інформаційних розрядів відповідно до розрядної сітки .
2.2.3Разработка функціональної схеми вузла контролю.
Проектований пристрій призначається для передачі шістнадцяти бітової інформації шини даних накопичувача на жорстких магнітних дисках. Виходячи з цього вхідний регістр також повинен мати розрядність 16 біт. З виходів вхідного регістра інформація повинна поступати на кодуюче пристрій з метою отримання корегуючого слова і на вихідний регістр без зміни відповідно до розрядної сітки.
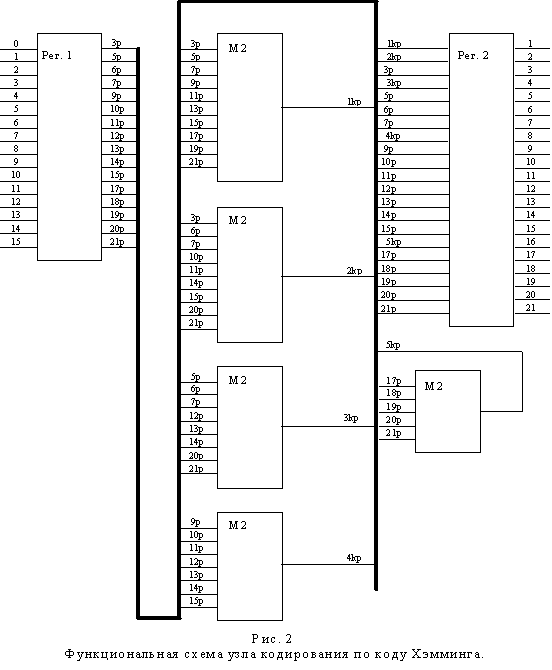
Кодуючий пристрій є набором з 5 суматорів по модулю 2, кожний з яких здійснює функцію отримання свого контрольного розряду.
Перший суматор по модулю 2 виконує функцію отримання першого контрольного розряду по формулі з таблиці 3:
1кр=3рÅ5рÅ7рÅ9рÅ11рÅ13рÅ15рÅ17рÅ19рÅ21р (2.1.)
для цього на його входи подаються відповідні розряди. Вихідний контрольний розряд поступає на перший розряд вихідного регістра відповідно до розрядної сітки.
Другий суматор по модулю 2 виконує функцію отримання другого контрольного розряду по формулі з таблиці 3:
2кр=3рÅ6рÅ7рÅ10рÅ11рÅ14рÅ15рÅ18рÅ19р (2.2.)
для цього на його входи подаються відповідні розряди. Вихідний контрольний розряд поступає на другий розряд вихідного регістра відповідно до розрядної сітки.
Третій суматор по модулю 2 виконує функцію отримання третього контрольного розряду по формулі з таблиці 3:
3кр=5рÅ6рÅ7рÅ12рÅ13рÅ14рÅ15рÅ20рÅ21р (2.3.)
для цього на його входи подаються відповідні розряди. Вихідний контрольний розряд поступає на четвертий розряд вихідного регістра відповідно до розрядної сітки.
Четвертий суматор по модулю 2 виконує функцію отримання четвертого контрольного розряду по формулі з таблиці 3:
4кр=9рÅ10рÅ11рÅ12рÅ13рÅ14рÅ15р (2.4.)
для цього на його входи подаються відповідні розряди. Вихідний контрольний розряд поступає на восьмий розряд вихідного регістра відповідно до розрядної сітки.
П'ятий суматор по модулю 2 виконує функцію отримання п'ятого контрольного розряду по формулі з таблиці 3:
5кр=17рÅ18рÅ19рÅ20рÅ21р (2.5.)
для цього на його входи подаються відповідні розряди. Вихідний контрольний розряд поступає на шістнадцятий розряд вихідного регістра відповідно до розрядної сітки.
Розрядність вихідного регістра відповідно до таблиці 1 буде 21 біт: 16 інформаційних розрядів + 5 контрольних.
Після вихідного регістра інформація через зону перешкод поступає на декодуюче пристрій.
Представлена на рисунку 2.2 функціональна схема вузла кодування повністю відповідає вище розглянутому опису принципу роботи.
2.2.4 Вибір і опис елементної бази
Вибір елементної бази визначається системою елементів закладених в базовому пристрої. Базовим пристроєм є НЖМД, тому як елементна база вибираємо мікросхеми К555 серії.
Достоїнства:
Функціональна повнота
Серія добре освоєна в серійному виробництві
Має високу здатність навантаження
Має стандартний рівень сигналів і легко стикується з іншими серіями
Має не високу вартість
ІМС серії К555 – це набір напівпровідникових логічних схем ТТЛШ.
ІМС зберігають свої параметри при дії наступних зовнішніх умов:
Температура від –10 до +70 °З
Атмосферний тиск від 15мм до 3 атмосфер
Вогкість повітря до 98% при t=40 °З
Вібрації в діапазоні то 5 до 200 Гц
Багатократні удари з прискоренням до 35g
Лінійні навантаження до 150g
Теплові удари від –10 до +70 °З
Основні технічні характеристики ІМС К555
Напруга живлення то джерела постійного струму +5В±5%
Значення логічної ‘1’ U1³ 2.4В
Значення логічного ‘0’ U0£ 0.4В
Середній час затримки на один логічний елемент t зд.ср » 18нс
Гарантійне напрацювання на відмову Тср. = 100000 ч
Споживана потужність Р» 2мВт
ІМС мають пластмасовий корпус із стрижньовими висновками. Причому загальний дріт подається на висновок 7,8 або 12 залежно від ступеня інтеграції мікросхеми. Живлення подається на 14,16 або 24 висновок.
2.2.5 Розробка принципової схеми вузла контролю.
В якості вхідного шістнадцяти розрядного регістра, в слідстві того, що такі регістри відсутні в 555 серії ІМС, використовуватиму два вісім розрядні регістри К555ИР2.
Оскільки суматори по модулю 2 відсутні у вибраній 555 серії ІМС, то замість їх доведеться використовувати логічні елементи "що виключає або". Але в 555 серії ІМС відсутні многовходовые логічні елементи "що виключає або", тому необхідно використовувати двухвходовые елементи К555ЛП5, побудовані пірамідою.
Як вихідний регістр також візьму три вісім розрядні регістри К555ИР2. Причому в третьому використовуватимуться тільки перші п'ять розрядів. В регістрах К555ИР2 використовується вхід інверсний (активний по низькому рівню вхідного сигналу) дозволу прочитування ER, але необхідно щоб інформація з регістрів прочитувалася постійно, тому входи всіх регістрів ER з'єднується із загальним дротом.
На рисунку 2.2 приведена електрична принципова схема вузла кодування за кодом Хеммінга.
Примітка до принципової схеми:
Висновки 12 мікросхем DD 1,DD 2,DD 12,DD 13,DD 14 і висновки 7 мікросхем DD 3 – DD 11 сполучені із загальним дротом.
Висновки 24 мікросхем DD 1,DD 2,DD 12,DD 13,DD 14 і висновки 14 мікросхем DD 3 – DD 11 сполучені з шиною живлення +5 В.
2.2.6 Розрахунок швидкодії схеми
Швидкодією називається затримка вихідного сигналу щодо вхідного. Затримка обумовлена інерційністю логічних елементів. Кожний елемент затримує сигнал на час t зд.ср, яке розраховується по формулі (2.1)
t зд.ср = (t зд.01 + t зд.10)/2 (2.1)
де t зд.01 – час перемикання логічного елемента із стану «0» в стан «1»; t зд.10 - час перемикання логічного елемента із стану «1» в стан «0». Загальна швидкодія схеми визначається як затримка послідовно сполучених елементів і розраховується по формулі (2.2)
t зд.общ = Nåi=1 t зд.ср i×n (2.2)
де t зд.ср i – час затримки i-го елемента; N – число типів елементів; n – число однотипних елементів. В даній схемі затримка розраховуватиметься по формулі (2.3)
t зд.общ = 2 t зд.ср ир 22 + 4t зд.ср лп5 (2.3)
t зд.ср ир 22 = (10+10)/2=10 нс.
t зд.ср лп5 = (45+50)/2=47,5 нс.
t зд.общ = 2×10+4*47,5=210 нс.
2.2.7 Розрахунок споживаної потужності
Споживаюча потужність всієї схеми контролю рівна сумі потужностей споживання всіх корпусів ІМС реалізовуючих схему і розраховується по формулі (2.4)
Р потр. = N?i=1 Р потр.i × n (2.4)
де Р потр.i – потужність споживання i-й ІМС; n – число однотипних ІМС; N – число типів ІМС. В даній схемі потужність споживання розраховується по формулі (2.5)
Р потр. =5 Р потр.ир22 + 9Р потр.лп5 (2.5)
Р потр. ир22 = 2 мВт
Р потр. лп5 = 12 мВт
Р потр.=4×2+9*12=123 мВт
2.3.1 Профілактичне обслуговування накопичувача
2.3.1.1 Форматування диска
Форматування диска є важливою частиною підготовки диска до роботи, оскільки диск до роботи, який не відформован, не готовий. Суть форматування полягає в розбитті диска на сектори і доріжки.
Повне форматування жорсткого диска складається з трьох етапів. Перший етап називається фізичним форматуванням, або форматування низького рівня. Другий етап називається організацією розділів, а третій логічним форматуванням, або форматування високого рівня.
Форматування низького рівня проводиться по доріжках. Звичайно контроллер виконує його для конкретної доріжки і іноді для всього накопичувача. Деякі програми дозволяють також проводити форматування для певного діапазону доріжок. Це означає, що вони повторюють команду контроллеру форматувати одну доріжку для кожної головки до форматування вказаного діапазону циліндрів.
Деякі жорсткі диски поставляються вже із записаним форматом низького рівня. Такі накопичувачі поставляються з відповідним контроллером.
Після провидіння фізичного форматування проводиться організація розділів. Вона полягає в розділенні диска на розділи, в яких можна берегти файли інформації. При організації розділів створюється три основні секції: головний завантажувальний запис (таблиця розділів), середня частина і діагностичний циліндр.
Після проведення форматування низького рівня і організації розділів диск готовий до проведення форматування високого рівня. В процесі логічного форматування Ос створює свою організацію в дисковому томі. В DOS це здійснює команда FORMAT. Вона розбиває логічний том DOS на чотири області: завантажувальна секція, таблиці розміщення файлів, кореневий каталог і область даних, в якій зберігаються файли.
2.3.1.2 Резервування інформації.
Існує три види резервування: повне резервування, инкрементальное резервування і диференціальне резервування.
Повне резервування полягає в копіюванні всієї інформації з жорсткого диска на деякий носій для безпечного зберігання. Для регулярного створіння повних резервних копій використовують стрічковий накопичувач. Всякий раз, коли програма просить DOS відкрити файл і дати дозвіл на прочитування і запис інформації в цей файл, DOS встановлює для файлу прапорець, що показує, що це зроблено. Прапорцем служить один біт в байті атрибутів, береженому в елементі каталогу для кожного файлу. Цей біт називається архівним. Багато програм резервування застосовують цей біт при виборі файлів для резервування.
Інкрементне резервування полягає у виконанні одній з таких програм і копіювання на резервний носій всіх файлів, у яких включений архівний біт, після цього біти скидаються. Недоліком цього виду резервування є те, що резервується багато файлів, які програми відкривали тільки для перегляду вмісту файлів, але не змінювали його. У разі великих файлів бази даних незабаром можуть з'явитися багатократні копії одних і тих же даних. Тому оптимальне инкрементальное резервування припускає активну участь користувача в процесі резервування, тобто коли програма показує список всіх файлів зі встановленим архівним бітом, користувач може вибрати які з них резервувати і які ігнорувати. Головна гідність инкрементального резервування полягає в тому, що в процесі резервування бере участь мінімум байтів. Завдяки скороченню тривалості резервування можна проводити частіше.
Ідея дефференциального резервування полягає в тому, щоб час від часу проводити повне резервування. Потім при новому резервуванні копіювати тільки ті файли, які змінилися після останнього повного резервування. В дефференциальном підході сочитается простота повного резервування і часткова економія инкрементального резервування. При кожному створінні резерву зберігаються всі файли, які змінилися після останнього повного резервування, а не просто останнього резервування.
2.3.2 Захист від вірусів
Комп'ютерний вірус – це невелика програма, яка приписує себе в кінець виконуваних файлів, драйверів, або поселяються в завантажувальному (ВООТ) секторі диска. При запуску заражених програм і драйверів спочатку відбувається виконання вірусу, а вже потім управління передається самій програмі. Якщо ж вірус поселився в завантажувальному секторі, то його активізація відбувається у момент завантаження операційної системи з такого диска. В той момент, коли управління належить вірусу, звичайно виконуються різні неприємні для користувача, але необхідні для продовження для продовження життя даного вірусу дії. Це знаходження і зараження інших програм, псування даних і т.д. Вірус може залишитися в пам'яті резидентний і продовжувати шкодити до перезавантаження комп'ютера. Після закінчення роботи вірусу управління передається зараженій програмі, яка звичайно працює “ як ні в чому не було ”, маскуючи тим самим наявність в системі вірусу. На жаль, дуже часто вірус виявляється надто пізно, коли більшість програм вже заражена. В цих випадках втрати від шкідливих дій вірусу можуть бути великий.
2.3.2.1 Прояви вірусів
Сильне уповільнення роботи комп'ютера.
Несподівана поява на екрані сторонніх фраз.
Поява різних відеоефектів.
Генерація різних звуків.
Деякі програми перестають працювати, а інші ведуть дуже дивно.
На дисках з'являються велика кількість зіпсованих файлів даних, текстових файлів.
Разом рушиться вся файлова система на одному з дисків.
Операційна система несподівано перестає бачити вінчестер.
Довільно змінюється довжина окремих файлів.
2.3.2.2 Профілактичні заходи
Всі важливі програми і дані необхідно мати зовні комп'ютера. Це дозволить у разі псування вірусом або через збої в роботі устаткування швидко відновити втрачену інформацію.
Результати своєї поточної роботи рекомендується зберігати на дискетах не рідше разу на тиждень, тоді втрати від вірусів і збоїв в роботі устаткування будуть не так великі.
Будь-які програми і драйвери, які ви збираєтеся використовувати на комп'ютері перед першим запуском, обов'язково необхідно перевірити на наявність вірусів програмами-детекторами (ці програми дозволяють перевірити файли на інфікованість їх вірусом), - скажімо, AIDSTEST або Dr.Web. Ці програми постійно обновляються (в них додаються виявлення нових вірусів), тому рекомендується завжди мати самі останні версії. Крім того, Dr.Web має в своєму складі евристичний аналізатор, що дозволяє знаходити підозрілі ділянки коду, характерні для вірусів, що самомодифікуються.
Якщо програми поступили до вас у вигляді, що заархівував, то перед перевіркою архів необхідно розвернути. Але до перевірки не треба запускати які-небудь програми з цього архіву.
При постійному перенесенні на ваш комп'ютер нових файлів рекомендується встановити одну з програм-ревізорів, скажемо пакет Adif (ці програми відстежують зміну в системі – зміни на дисках, розподіл пам'яті, включення і відключення драйверів – і при підозрілих діях попереджають користувача). Це якоюсь мірою застрахує від появи нових вірусів. Відразу після установки нової програми (особливо невідомого походження) необхідно також на деякий час встановити одну з програм-фільтрів (програм, що відстежують поточні операції з диском і пам'яттю і повідомляючих про те з них, які можуть бути викликаний вірусом). Якщо в перебігу декількох днів ніяких підозрілих дій не виявиться, то програму-фільтр можна відключити.
2.3.3 Характерні несправності і методи їх усунення
2.3.3.1 Збої даних
Прикладами поширених помилок користувачів служить стирання файлу COMMAND.COM або копіювання на нього іншої версії програми; стирання всіх файлів в кореневому каталозі або помилкове виконання команди FORMAT З:. Типовими індикаторами нещасть з даними служать такі повідомлення: “ Можливо, не DOSдиск”, “Погана таблиця розділів”, “Помилка завантаження з диска” і ін.
Існують наступні способи усунення подібних несправностей:
· якщо командою FORMAT З: був реформований жорсткий диск, то потрібен спосіб відміни наслідків форматування. В DOS починаючи з версією 5 є програма UNDELETE, яка вирішує цю проблему;
· якщо видалена правильна версія файлу COMMAND.COM, треба скопіювати файл на жорсткий диск з оригінального диска DOS;
· при видаленні всіх файлів в кореневому каталозі їх можна відновити з резервних файлів;
· якщо завантажитися з диска не можна або на ньому зіпсована таблиця розділів, то можуть допомогти програми Norton Disk Doctor, Disk Tool і Disk Editor з утиліт Нортона.
2.3.3.2 Апаратні несправності
Статичне тертя. Полягає в тому, що після виключення комп'ютера головки приклеюються до поверхні диска. При включенні комп'ютера посилення двигуна не достатньо для зсуву головок. Якщо звільнити диск, двигун знов обертатиме диски до наступного виключення.
Несправність підшипника шпінделя. Іноді повністю заїдає підшипник шпінделя, і диски не обертаються. Єдиним рішенням є відправка накопичувача в спеціалізовану фірму.
Несправності електроніки накопичувача. Приблизно 20% апаратних відмов накопичувачів доводиться на не справності електронних схем, змонтованих на накопичувачі. Накопичувач і головки можуть працювати добре, але електронна схема не забезпечує запис або прочитування даних. Для діагностики цієї поломки можна замінити електронну платню працездатною платнею або аналогічного накопичувача.
Крах головки. Пошкодження через крах головки виникають рідко. При кожному виключенні персонального комп'ютера головки плавно “приземляються”, але пошкодження магнітного покриття поверхні відбувається рідко. Для додаткової зашиті необхідний паркувати головки, позиціонуючи їх на таке місце, де немає важливих даних.
Відмова контролера. Плата контролерів жорстких дисків відмовляє рідко, але наслідки такої відмови вельми великі. Наприклад, при зверненні до жорсткого диска персонального комп'ютера може видати такі повідомлення: “Неправильний накопичувач ” « Загальна помилка читання в накопичувачі З ” або “ Накопичувач не готовий ”. Діагностичні програми можуть виправити відмову.
3. Розрахунок надійності вбудованого контролеру
3.1 Надійність систем. Поняття надійності
Надійністю називають властивість об'єкту зберігати в часі у встановлених межах значення всіх параметрів, що характеризують здатність виконувати необхідні функції в заданих режимах і умовах застосування, технічного обслуговування, ремонтів, зберігання і транспортування. Розширення умов експлуатації, підвищення відповідальності виконуваних радіоелектронними засобами (РЕЗ) функцій, їх ускладнення приводить до підвищення вимог до надійності виробів.
Надійність є складною властивістю, і формується такими складовими, як безвідмовність, довговічність, відновлюваність і сохраняємость. Основним тут є властивість безвідмовності - здатність виробу безперервно зберігати працездатний стан протягом часу. Тому найбільш важливим в забезпеченні надійності РЕЗ є підвищення їх безвідмовності.
Особливістю проблеми надійності є її зв'язок зі всіма етапами “життєвого циклу” РЕЗ від зародження ідеї створення до списання: при розрахунку і проектуванні виробу його надійність закладається в проект при виготовленні надійність забезпечується, при експлуатації - реалізується. Тому проблема надійності - комплексна проблема і вирішувати її необхідно на всіх етапах і різними засобами. На етапі проектування виробу визначається його структура, проводиться вибір або розробка елементної бази, тому тут є найбільші можливості забезпечення необхідного рівня надійності РЕЗ. Основним методом рішення цієї задачі є розрахунки надійності (в першу чергу - безвідмовності), залежно від структури об'єкту і характеристик його складників, з подальшою необхідною корекцією проекту.
3.2 Кількісні характеристики безвідмовності
3.2.1 Напрацювання на відмову
Безвідмовність (і інші властивості надійності, що становлять) РЕЗ виявляється через випадкові величини, напрацювання до чергової відмови і кількість відмов за заданий час. кількісними характеристиками властивості тут виступають імовірнісні змінні.
Напрацювання є тривалість або об'єм роботи об'єкту. для РЕЗ природне числення напрацювання в одиницях часу, тоді як для інших технічних засобів можуть бути зручніше інші засоби вимірювання (наприклад, напрацювання автомобіля - в кілометрах пробігу). Для не відновлюваних і відновлюваних виробів поняття напрацювання розрізняється, в першому випадку підразумивається напрацювання до першої відмови (він же є і останньою відмовою), в другому - між двома сусідніми в часі відмовами (після кожної відмови проводиться відновлення працездатного стану). Математичне очікування випадкового напрацювання Т є характеристикою безвідмовності і називається середнім напрацюванням на відмову (між відмовами).
 (1.1)
(1.1)
У (1.1) через t позначено поточне значення напрацювання, а f(t) щільність вірогідності її розподілу.
Вірогідність безвідмовної роботи - вірогідність того, що в межах заданого напрацювання t відмова об'єкту не виникає:
 (1.2)
(1.2)
Вірогідність протилежної події називається вірогідністю відмови і доповнює вірогідність безвідмовної праці до одиниці:
q(t)=Вер(TЈ t) =1 - p(t)=F(t). (1.3)
У (1.2) і (1.3) F(t) є інтегральна функція розподіл випадкового напрацювання t. Щільність вірогідності f(t) також є показником надійності, званим частотою відмов:
![]() (1.4)
(1.4)
З (1.4) очевидно, що вона характеризує швидкість зменшення вірогідності безвідмовної роботи в часі.
Інтенсивністю відмов називають умовну щільність вірогідності виникнення відмови виробу за умови, що до моменту t відмова не виникла:
![]() (1.5)
(1.5)
Функції f(t) і l (t) вимірюються в ч-1.
Інтегруючи (1.5), легко отримати:
 (1.6)
(1.6)
Це вираз, званий основним законом надійності, дозволяє встановити тимчасову зміну вірогідності безвідмовної роботи при будь-якому характері зміни інтенсивності відмов в часі. У окремому випадку постійності інтенсивності відмов l(t)=l=const (1.6) переходить у відоме в теорії вірогідності експоненціальний розподіл:
![]() (1.7)
(1.7)
Потік відмов при l (t)=const називається простим і саме він реалізується для більшості РЕЗ в перебігу періоду нормальної експлуатації від закінчення прироблення до початку старіння і зносу.
Підставивши вираз щільності вірогідності f(t) експоненціального розподілу (1.7) в (1.1), отримаємо:
T0 =1/l, (1.8)
тобто при простому потоці відмов середнє напрацювання Т0 назад інтенсивності відмов l. З допомогою (1.7) можна показати, що за час середнього напрацювання, t= Т0, вірогідність безвідмовної роботи виробу складає 1/е. Часто використовують характеристику, звану g - процентним напрацюванням - час, в перебігу якого відмова не наступить з вірогідністю g (%):
![]() (1.9)
(1.9)
Вибір параметра для кількісної оцінки надійності визначається призначенням, режимами роботи виробу, зручністю застосування в розрахунках на стадії проектування.
3.2.2 Вірогідність безвідмовної роботи
Вірогідність того, що в межах заданого напрацювання t відмова об'єкту не виникає:
 (1.10)
(1.10)
Вірогідність протилежної події називається вірогідністю відмови і доповнює вірогідність безвідмовної праці до одиниці:
q(t)=Вер(TЈ t) =1 - p(t)=F(t). (1.11)
У (1.10) і (1.11) F(t) є інтегральна функція розподіл випадкового напрацювання t. Щільність вірогідності f(t) також є показником надійності, званим частотою відмов:
![]() (1.12)
(1.12)
З (1.12) очевидно, що вона характеризує швидкість зменшення вірогідності безвідмовної роботи в часі.
3.3 Постанова математичної моделі розрахунку
При розрахунку надійності приймаються наступні допущення:
- відмови елементів є незалежними і випадковими подіями;
- враховуються тільки елементи, що входять в завдання;
- вірогідність безвідмовної роботи підкоряється експоненціальному закону розподілу;
- умови експлуатації елементів враховуються приблизно за допомогою коефіцієнтів;
- враховуються катастрофічні відмови.
Відповідно до прийнятих допущень в розрахункову схему повинні входити наступні елементи:
- елемент К1, тобто кількість СІС і БІС;
- елемент К2, тобто кількість ІС малого ступеня інтеграції (МІС);
- елемент К3, тобто кількість резисторів;
- елемент К4, тобто кількість конденсаторів:
- елемент К5, тобто кількість світлодіодів;
- елемент К6 тобто кількість паяних з'єднань;
- елемент К7, тобто кількість роз'ємів.
Відповідно до розрахункової схеми вірогідність безвідмовної роботи системи визначається як:

де N - кількість таких елементів, що використовуються в завданні
Pi - вірогідність безвідмовної роботи i-го елемента.
Враховуючи експоненціальний закон відмов, маємо:
де ni - кількість елементів одного типу, lj- інтенсивність відмов елементів j-го типу. Прічому lj=kl x lj0, де kl - коефіцієнт, що враховує умови експлуатації, а lj0 - інтенсивність відмов в лабораторних умовах.
Сумарна інтенсивність відмов елементів одного типу складі
Виходячи з умов експлуатації приймаємо kl=1. Ніяких додаткових поправочних коефіцієнтів вводитися не буде, оскільки всі елементи системи працюють в нормальних умовах, передбачених в ТУ на дані елементи.
Для елементів. що використовуються для побудови вбудованого контролеру, прийняті наступні інтенсивності відмов:
Мікросхеми з 14 виводами l1 = 4.5x10-7
Мікросхеми з 16 виводами l2 = 4.0x10-7
Мікросхеми з 48 виводами l3 = 3.2x10-7
Резисторі l4 = 1.0x10-5
Конденсаторі електролітичні l5 = 0.1x10-5
Конденсаторі керамічні l6 = 0.04x10-5
Світлодіоди l7 = 0.26x10-5
Паяні з'єднання l8 = 1.0x10-7
Роз'єми з 48 виводами l9 = 0.2x10-5
3.4 Розрахунок надійності вбудованого контролеру
Виходячи з цих значень можна підрахувати сумарну інтенсивність відмов всіх елементів одного типу, а потім і для всіх елементів вбудованого контролеру.
![]()
Вірогідність безвідмовної роботи вбудованого контролеру за Т=1000 годин
![]() ;
;
![]()
Середній година напрацювання на відмову
Тм = 1/lЕобщ
Наша схема вбудованого контролеру включає в свій склад наступні елементи:
Конденсаторі електролітичні – 4.
Конденсаторі керамічні – 17.
БІС з 14 висновками – 17.
Паяні з'єднання – 328.
Роз'єми з 48 виводами – 1.
Тоді
lЕобщ.=4*0,1*10-5+17*0,04*10-5+17*4,5*10-7+328*1,0*10-7+1*0,2* 10-5=5,325*10-5
Оскільки ВК не має резервних елементів, і вихід з ладу будь-якого з елементів спричинить за собою відмову всього пристрою, то середній час напрацювання на відмову визначиться як
Тм = 1/2,295*10-5= 43572 годин.
Тоді вірогідність безвідмовної роботи за восьмигодинну зміну складає:
![]()
За період Т=1000 годин, вірогідність складає 0, 8441
4. Складання конфігурацій комп’ютера для придбання нового в замін комп’ютера, що вийшов з ладу
4.1 Завдання
У рекламному відділу невеликого офісу, вийшов з ладу, по причині фізичного зносу, комп’ютер, на якому працюють в офісі. З метою придбання нового, треба скласти необхідну конфігурацію сучасного економічного вигідного комп’ютера. Кошти на нову техніку у підприємства обмежені. Виходячи з цього необхідно знайти баланс між ціною та якістю.
4.2 Аналіз необхідної конфігурації
Комп’ютери, що працюють з відео призначені для застосування в якості машин для введення, тимчасового зберігання, редагування необхідної інформації:
- зберігання та робота з інформацією;
- надійність;
- ергономічність.
Враховуючи перераховане вище та можливість роботи комп’ютера в складі локальної комп’ютерної мережі, можливо скласти наступні вимоги до конфігурації:
- достатня швидкість роботи процесора;
- некритичний об’єм пам’яті;
- обов’язкова присутність мережної карти
- середній об’єм накопичувача на жорстких дисках;
- наявність пишучого приводу CD дисків
- вартість програмного забезпечення при складанні конфігурації не враховується.
4.3 Складання конфігурації
Для задоволення вимог до складових комп’ютера, слід запропонувати наступні конфігурації (таблицях 4.1 – 4.3):
Таблиця 4.1 – Перша конфігурація
| Найменування складової частини | Ціна, дол. |
| AMD ATHLON LE-1600 (AM2) BOX (ADH1600DHBOX) | 56,72 |
| CPU COOLER AVC Z9U741L001 на Socket 775, heatpip | 10,59 |
| Socket 775: Intel 945GC+ICH7 ASUS P5GC-MX; mATX/ | 56,72 |
| DDR II 512Mb 667 MHz PC2-5300 Brand Samsung | 14,57 |
| DVD-ROM 16x/48x, LG Black , 21,600 Kb/sec(16xDVD | 19,19 |
| HDD: 80.0g 7200 Serial ATA II Samsung 8Mb (NCQ) | 53,01 |
| PCIeX: ATI X1550 SAPPHIRE 256MB/128bit/DDR2/TV/D | 58,31 |
| ATX Middle Tower KM KOREA Pro Mast, Silver, PSU | 37,8 |
| 17" TFT, AOC 172S (TN, 8ms, 270/600:1, 150/130 D | 219,28 |
| Spk, 2.0, Genius SP-P110 (Beige), 1Wx2, 200-20КГ | 5,42 |
| Keyboard, Genius KB-06X (E) PS/2, PS/RS/BIG ENTE | 5,31 |
| Mouse, A-4 Tech OP-620(D) PS/2 optical, 650 dpi, | 4,23 |
| Mouse Pad Digitex, тканевый верх, резиновая осно | 0,8 |
| Всього: | 548,77 |
Таблиця 4.2 – Друга конфігурація
| Найменування складової частини | Ціна, дол. | |
| Intel Pentium dual-core LGA 775 1.8G/1Mb/800 FSB | 90,41 | |
| Socket 775: Intel G965+ICH8 INTEL DG965SSCK bulk | 109,22 | |
| DDR II 1 Gb 667 MHz PC2-5300 PQI | 24,23 | |
| FDD 3,5", Mitsumi Black | 7,57 | |
| DVD -RW/+RW , NEC SATA (AD-7203S) Lableflash 20x | 35,46 | |
| HDD:160.0g 7200 Serial ATA II Western Digital 16 | 73,09 | |
| PCIeX: ATI X1650 SAPPHIRE 256MB/128bit/DDR3/TV/D | 63,6 | |
| ATX Midi Tower Storm 2662-4-SX, PSU 400W (AB POW | 54,6 | |
| 19"TFT, SAMSUNG 920NW (LS19HANKSM) ( 5ms,300/70 | 231,38 | |
| Spk, 2.0, F&D SPS 606 (silver), 2x2.5W, 60-16KHz | 15,1 | |
| Keyboard, Genius KB-220 USB, Black, Slim, Multim | 9,62 | |
| Mouse, A-4 Tech BW-26(X5-26D)-(6,5) ( USB+PS/2 | 7,57 | |
| Mouse Pad ПРОБКОВЫЙ "Техас" 20х23см крупная крош | 0,8 | |
| Всього: | 722,65 | |
Таблиця 4.3 – Третя конфігурація
| Найменування складової частини | Ціна, дол. |
| AMD PHENOM X4 9500 (AM2) BOX (HD9500WCGDBOX) | 236,42 |
| Socket 775: Intel 975X+ICH7R INTEL D975XBX2KR | 185,54 |
| DDR II 2 Gb 800 MHz PC2-6400 A-DATA | 50,36 |
| FDD 3,5", Mitsumi Silver | 8,22 |
| DVD -RW/+RW, LG RTL SuperMulti Double Layer, 20x | 71,51 |
| HDD:500.0g 7200 Serial ATA II WD (5000АACS ) 16M | 167,52 |
| PCIeX: nVidia 8600GTS PALIT 512MB/128bit/DDR3/TV | 208,86 |
| EATX Midi Tower CHIEFTEC AEGIS CH-05B-B-OP, no/P | 80,98 |
| 19"TFT, SAMSUNG 961BF (LS19PFDQSQ) | 398,24 |
| Spk, 2.0, Sven BF-31R (Silver) 2x18W,40-20KHz, д | 66,42 |
| Keyboard, Logitech Media 600, USB, RTL (920-0000 | 32,25 |
| Mouse, A-4 Tech BW-26(X5-26D)-(4,3) USB+PS/2 opt | 7,46 |
| Mouse Pad ПРОБКОВЫЙ "Прорезиненный" тол. 3мм, 20 | 1,00 |
| Блок питания FSP 500W Blue Storm (AX500-A), Pass | 72,78 |
| Всього: | 1587,56 |
Всі конфігурації складені на підставі прайс – листу фірми „Информационные технологии” (м. Северодонецьк) від 17.02.2008р.
4.4 Вибір відповідної конфігурації
Розглянувши запропоновані конфігурації можливо зробити такі висновки:
- перша конфігурація більш дешева, тобто вона є економічно найвигіднішою і, при значному обмеженню в коштах, можливо придбати саме такий комп’ютер, але складові, що застосовані при розробці конфігурації, вже зняті з виробництва та пропонуються продавцями лише для заміни в несправних застарілих машинах, або для незначного підвищення продуктивності таких комп’ютерів.
- Третя конфігурація є найбільш модернізованою, в неї враховані усі тенденції ринку сучасної комп’ютерної техніки, така конфігурація не потребує модифікації протягом наступного ріку – півтора, незначних змін протягом двох – трьох років, та протягом п’яти років вона застаріє. Ця конфігурація потребує вкладення значних коштів, що не відповідає умовам завдання;
- Друга конфігурація є достатньо сучасною, та буде справно працювати протягом тривалого часу, за умовою правильного своєчасного і технічно грамотного обслуговування. Необхідність модифікації чи збільшення продуктивності потребується через рік півтори, на той час можливо знайдуться кошти на придбання необхідних додаткових пристроїв. Така конфігурація найбільше відповідає умовам завдання по критерію „ціна – якість - економічність”.
На підставі зробленого аналізу при несприятливих економічних умовах, слід запропонувати для придбання комп’ютер складений на підставі другої конфігурації.
Висновок
У курсовому проекті з предмету “Технічне обслуговування ЕОМ” ми розглянули такі питання, як:
1) Задачі масового обслуговування та моделі для імітації виробничої діяльності. Конкретно описували питання: задачі аналізу розімкнутої, замкнутої, багатоканальної системи з очікуванням (потоки вимог Пуасоновські).
2) Обслуговування та експлуатація матричних та струминних принтерів. Конкретно розглядали такі питання: мови принтеру, пристрої друку текстової і графічної інформації, типовий принтер, гольчаті принтери, дозвіл принтера та інше.
3) Розраховували надійність вбудованого контролера.
4) Складали конфігурацію офісного персонального компютера, вони призначені для введення, тимчасового зберігання, редагування необхідної інформації.
Література
1. Б.М. Каган, И.Б. Мкртумян Основы эксплуатаций ЭВМ – М.: Энегроатомиздат, 1988 г. - 434 с.
2. В.Н. Ярмольник Контроль и діагностика цифрових узлов ЭВМ – М.: Энегроатомиздат, 1992 г. – 236 с.
3. Мюлер С. Модернизация и ремонт ПК, 14-е издание. Пер. с анг. – Издательский дом „Вільямс” – 2003 г. – 1184 с.: ил.
4. Лекції по технічному обслуговуванні ЕОМ.
5. Ресурси інтернет