
Рефераты по рекламе
Рефераты по философии
Рефераты по финансам
Рефераты по химии
Рефераты по цифровым устройствам
Рефераты по экологическому праву
Рефераты по экономико-математическому моделированию
Рефераты по экономической географии
Рефераты по экономической теории
Рефераты по этике
Рефераты по юриспруденции
Рефераты по языковедению
Рефераты по юридическим наукам
Рефераты по истории
Рефераты по компьютерным наукам
Рефераты по медицинским наукам
Рефераты по финансовым наукам
Рефераты по управленческим наукам
Рефераты по строительным наукам
Психология педагогика
Промышленность производство
Биология и химия
Языкознание филология
Издательское дело и полиграфия
Рефераты по краеведению и этнографии
Рефераты по религии и мифологии
Рефераты по медицине
Рефераты по сексологии
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Реферат: Следящие системы
Реферат: Следящие системы
Дано:
Djå = 2,5 ¢
Wвв = 0,5 рад/с
Мн = 0,8 Нм
Jн = 0,3 Нмс²
eн = 0,7 рад/с²
d = 30 %
tпп = 0,3 с
Найти:
1. Составляющие Djå для определения добротности и коэффициент усиления усилителя.
2. Выбрать тип измерительного элемента и привести его характеристики , крутизну К1 и число каналов измерительной части .
3. Выбрать тип исполнительного элемента и привести его характеристики ,определить СΩ ,См ,Тм с учетом нагрузки , определить передаточное отношение редуктора .
4. Определить коэффициент усиления усилителя .
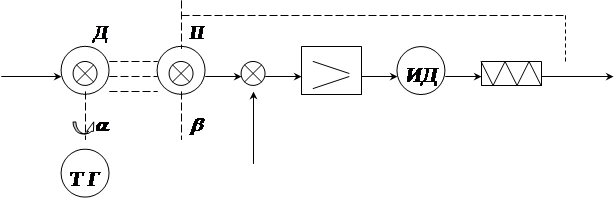
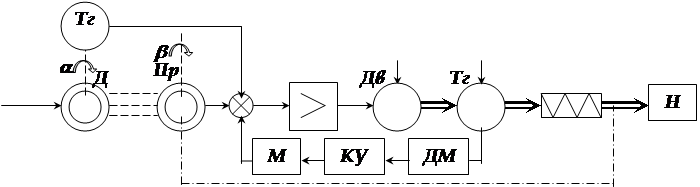
5. Начертить функциональную и структурную схемы нескорректированой системы , составить передаточные функции отдельных звеньев и системы в целом .
6. Построить ЛАЧХ нескорректированой системы и желаемую ЛАЧХ.
7. Определить вид и параметры корректирующего устройства (коррекция с обратной связью).
8. По ЛАЧХ скорректированой системы определить запас устойчивости по модулю и фазе , приблизительно оценить время переходного процесса в системе и величину перерегулирования при единичном ступенчатом воздействии на входе.
9. Начертить структурную схему скорректированой системы и записать ее передаточную функцию.
10. Построить переходной процесс одним из численных методов с приме-нением ЭВМ.
11. Определить время переходного процесса и величину перерегулирования и сравнить со значениями , полученными приближенно в пункте 8.

Расчетная часть
1.
Djå = Djиэ +Dj> +Djзз +Djл +Djмш +Djск +Djуск
Djå – суммарная погрешность;
Djиэ – погрешность измерительного элемента ( должна быть меньше либо равна половине суммарной погрешности ) ;
Dj> – погрешность, вносимая усилителем – преобразователем ( в маломощных системах работающих на переменном токе , погрешность усилителя связанная с дрейфом нуля отсутствует ) ;
Djзз – погрешность зоны застоя ( зависит от конструкции двигателя и коэффициента усиления усилителя и в целом от коэффициента усиления разомкнутой системы ) ;
1
Djзз = Ку
Djл – погрешность люфта кинематической передачи ( используя разрезанные шестерни стянутые пружинами, а так же специальные двухдвигательные схемы для выборки люфта, т.е. два двигателя один из которых выполняет роль исполнительного, а второй создает тормозной эффект. Они связаны с выходной первичной шестерней и выполняют роль распорного устройства, т.е. поддерживает положение шестерни редуктора в одном из выбранных крайних положений. Эту погрешность можно принять равной нулю);
Djмш – механическая погрешность шестерен ( присутствует обязательно. Для высокоточных систем в лучшем случае ее можно считать равной одной угловой минуте ) ;
Djск – скоростная погрешность ( для ее устранения используем комбинированную систему , т.е. на входную ось ставится тахогенератор );
|
|||
 |
|||
![]()
![]()
Djуск – погрешность по ускорению , требующегося , по заданию , обеспечить на выходном валу.
eн 1
Djуск = К ( Ту + Тм – К )
Из выше изложенного следует :
Djå = Djиэ +Djзз +Djмш +Djуск
2.
Так как 0,5Djå ≥ Djиэ в качестве измерительного элемента используем синусно-косинусный вращающийся трансформатор типа ВТ-5.
Параметры ИЭ:
Uп = 40 В ; Djиэ = 1 ¢;
f = 500 Гц ; m = 600 г ;
К1 = 5 мВ/угл. мин.
3.
В качестве исполнительного элемента используем двухфазный асинхронный двигатель переменного тока , который обладает малой инерционностью и малой постоянной времени.
Для определения типа исполнительного двигателя рассчитаем требуемую мощность:
Мн × Wвв 0,8 Нм × 0,5 рад/с
Ртр = h = 0,9 = 0,43 Вт
Так как мощность реального двигателя в 2-3 раза больше Ртр выбираем двигатель из семейства двигатель-генератор типа ДГ-2ТА.
Параметры ИД:
Рном = 2 Вт ; Uу = 30 В ;
Пном = 16000 об/мин ; Тм = 0,05 с ;
Мном = 18 × 10ˉ Нм ; Jд = 1,4 × 10ˉ Нм ;
Мп = 34 × 10ˉ Нм ; Uтр = 0,5 В .
Проверим этот двигатель на выполнение условия по перегрузке:
 |
 |
Мн +Jнeн 0,8 Нм + 0,3 Нмс²·0,7 рад/с²
![]()
![]() iо = Jдeн =
1,4 × 10ˉ Нм
·0,7 рад/с² = 10300
iо = Jдeн =
1,4 × 10ˉ Нм
·0,7 рад/с² = 10300
Мн Jн 0,8 Нм 0,3Нмс²
![]() Мтр = iоh + iо + Jд iо eн = 10300
·0,9 +
10300
+
1,4
× 10ˉ ×
Мтр = iоh + iо + Jд iо eн = 10300
·0,9 +
10300
+
1,4
× 10ˉ ×
× Нмс²× 10300 × 0,7 рад/с² = 2,05 × 10ˉ Нм
Проверка : Мтр 2,05× 10ˉ Нм
1. Мном = 18 × 10ˉ Нм = 0,11 < 2 условие выполнено
2. Wтр = Wн iо = 0,5 рад/с × 10300 = 5150 рад/с
p пном 3,14 × 16000
Wном = 30 = 30 = 1675 рад/с
Wном<Wтр
1675<5150
условие не выполнено
Случай , когда выполняется требование по моменту (ускорению), характерен для двигателей переменного тока . Очевидно, если двигатель , имеющий запас по мощности , не удовлетворяет требованию по скорости, то , изменяя передаточное отношение редуктора, можно согласовать соотношение между требуемой и располагаемой мощностями. Новое передаточное отношение можно определить по выражению:
Wном 1675
i = Wвв = 0,5 = 3350
Если при найденном значении i выполняется условие Мтр/Мном ≤ 2 , то выбор ИД можно считать законченным , т.к. этот двигатель удовлетворяет обоим условиям по обеспечению требуемой скорости и ускорения выходного вала.
Проверка:
Мн Jн 0,8 Нм 0,3Нмс²
Мтр = ih + i + Jд i eн = 3350 ·0,9 + 3350 + 1,4 × 10ˉ ×
![]()
× Нмс²× 3350 × 0,7 рад/с² = 2,78 × 10ˉ Нм
Мтр 2,78× 10ˉ Нм
Мном = 18 × 10ˉ Нм = 0,15 < 2 условие выполнено
Определение коэффициентов СΩ ,См ,Тм с учетом нагрузки:
Мп 34× 10ˉ Нм
См = Uу = 30 В = 1,13× 10ˉ Нм/В
30(Мп –Мном) 30 ( 34× 10ˉ Нм - 18× 10ˉ Нм )
вдв = p пном = 3,14× 16000 об/мин = 9,6× 10ˉ Нм
См 1,13× 10ˉ Нм/В
СΩ = вдв = 9,6× 10ˉ Нм = 117 рад/В× с
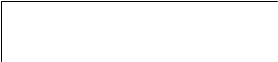
Найдем количество ступеней редуктора:
iред = 3350 = i12× i34× i56× i78 = 4 × 5 × 12 × 14 = 3360
 |
|||
|
|||
4.
Для питания обмоток управления асинхронного двигателя целесообразно применить усилитель переменного тока на полупроводниковых элементах. Передаточную функцию усилителя запишем так:
Ку _
Wу(Р) = ТуР + 1 , где Ту = 0,02 с
Найдем Ку исходя из заданной суммарной погрешности:
Djå = Djиэ +Djзз +Djмш +Djуск ,
где
![]() Djå = 2,5'
Djиэ = 1,0' Djмш= 1,0'
Djå = 2,5'
Djиэ = 1,0' Djмш= 1,0'
Djзз+Djуск = Djå - (Djиэ+Djмш)= 2,5' - 1' – 1' = 0,5'
eн 1
Djуск = К ( Ту + Тм – К )
1
Djзз = Ку
Пусть добротность К = 600 1/с , тогда
0,7·3438' 1
Djуск = 600 · ( 0,02 + 0,1 – 600 ) = 0,47'
Отсюда вычислим Ку:
1_
К = К1 · Ку · СW · Кред , где Кред = iред
( К× iред ) ( 600 1/с · 3350 ) _
Ку = ( К1· СW ) = ( 5 · 10ˉ³ В/угл.мин · 117 · 3438'/В · с ) = 1000
1 _
Djзз = 1000 = 0,001
DjΣ = 1' + 1' + 0,001' + 0,47' = 2,471'
DjΣр < DjΣз
условие выполнено
5.
Передаточные функции отдельных звеньев:
Так как в параллель измерительному элементу ставим тахогенератор,
в системе будет отсутствовать скоростная ошибка если:
К1 5 мВ/угл.мин
КТГ = К = 600 1/с = 0,008 мВ·с / угл.мин
Крутизна тахогенератора :
КТГ = 1¸ 5 мВ/об/мин
3 мВ·с_
Выберем КТГ = 3 мВ/об/мин = 0,1·3438΄ = 0,008 мВ·с/ угл. мин
W1(Р) = К1 ;
WТГ(Р)= КТГР ;
1000 _
Wу(Р) = (0,02Р + 1) ;
СW _ 117 _
Wдв(Р) = Р(ТмР + 1) = Р(0,1Р + 1) ;
Передаточная функция исходной системы:
К _ 600 _
Wисх(Р) = Р(ТмР + 1)(ТуР + 1) = Р(0,1Р + 1)(0,02Р + 1)
Проверка на устойчивость системы:
1 1
К ≤ Ту + Тм
600 ≤ 1/0,02 + 1/0,1
600 ≤ 60
условие не выполняется
( система не устойчива )
6.
L/W(jω)/:
20 lgК = 20 lg600 = 20 · 2,7782 = 55
ωу = 1/Ту = 1/0,02 = 50 1/с ;
lg50 = 1,7
ωд = 1/Тм = 1/0,1 = 10 1/с ;
lg10 = 1,0
L/Wж (jω)/:
4×p 4 × 3,14
ωср = tпп = 0,3 = 42 1/с ;
lg42 = 1,6
ω3 = 3 × 42 = 126 1/с ;
lg126 = 2,1
ω2 = ω3/10 = 126/10 = 12,6 1/с ;
lg12,6 = 1,1
ω1 = lg1,15 = 0,06
К _
Wисх(jω) = jω (Тм jω + 1)(Ту jω + 1)
К(Т2 jω + 1) _
Wж(jω) = jω (Т1 jω + 1)(Т3 jω + 1)²
Φ/Wисх (jω)/:
φисх = -90˚- arctgTy·ω - arctgTM·ω
φисх(ω1) = -90˚- arctg0,02· 1,15 – arctg0,1· 1,15 = - 98˚
φисх(ω2) = -90˚- arctg0,02· 12,6 – arctg0,1· 12,6 = - 156˚
φисх(ωср) = -90˚- arctg0,02· 42 – arctg0,1· 42 = - 207˚
Φ/Wж(jω)/:
φж = -90˚- arctgT1·ω –2· arctgT3·ω + arctgT2·ω
T1=1/ω1=1/1,15=0,87с; T2=1/ω2 =1/12,6= 0,08с; T3=1/ω3 =1/126= 0,008с
φж(ω1) = -90˚- arctg0,87·1,15 – 2· arctg 0,008· 1,15 + arctg0,08· 1,15 = - 131˚
φж(ω2) = -90˚- arctg0,87·12,6 – 2· arctg 0,008· 12,6 + arctg0,08· 12,6 = - 139˚
φж(ωср) = -90˚- arctg0,87· 42 – 2· arctg 0,008· 42 + arctg0,08· 42 = - 140˚
φж(ω3) = -90˚- arctg0,87· 126 – 2· arctg 0,008· 126 + arctg0,08· 126 = - 186˚
Δφ = - 180˚- φж(ωср) = - 180˚- (- 140˚) = 40˚
ΔL = 14дБ
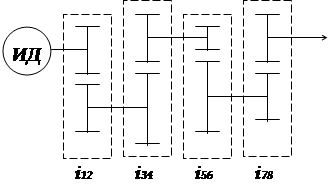
7.
Требуемая ЛАЧХ должна быть получена при введении корректирующего устройства в виде обратных связей ( по заданию ) .
Применение отрицательных обратных связей в качестве корректирующих устройств имеет ряд преимуществ . Они снижают влияние нелинейных характеристик тех участков цепи регулирования , которые охватываются обратными связями, снимают чувствительность к изменению параметров звеньев , уменьшают постоянные времени звеньев, охваченных обратной связью. На практике при проектировании следящих систем обратной связью чаще охватываются усилитеьные и исполнительные устройства.
Передаточная функция части системы , охваченной обратной связью, имеет вид: Wохв(P) _
Wобщ(P) = (Wохв(P) Wос(P) + 1)
Передаточная функция всей скорректированной системы определяется выражением:
Wск(P) = Wобщ(P) Wн(P)
где Wн(P) – произведение передаточных функций последовательно включенных звеньев основного канала , не охваченных обратной связью;
Найдем передаточную функцию обратной связи Wос(P) с использованием передаточной функции системы с последовательным корректирующим устройством.
![]()
![]()
1 1 _ Ky СW _
Wос(P) = Wохв(P) Wк(P) – 1 ; Wохв(P) = Р(TyP + 1) (TмP + 1)
L/Wк (jω)/ = L/Wж (jω)/ - L/Wисх (jω)/
По разности этих характеристик определяется тип корректирующего устройства и выбираются его параметры .
В нашем случае используем часто применяемый в следящих системах с последовательным корректирующим устройством интегродифференци-рующий контур с передаточной функцией:
(Т1Р + 1)(Т2Р + 1)
Wк(P) = (Т3Р + 1)(Т4Р + 1)
Известно, что для коррекции обратной связью на основании интегродифференцирующего контура существует передаточная функция:
Т'Р _
Wос(P)= (Т1Р + 1)
Эта передаточная функция соответствует передаточной функции дифференцирующего контура.
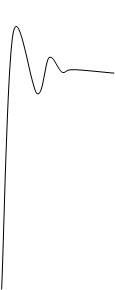
10.
Построим переходной процесс одним из численных методов с приме-нением ЭВМ.
|
![]()
![]()
![]()
![]()
|
![]()
|
По этому графику переходного процесса проведем анализ качества следящей системы с выбранным корректирующим устройством.
Переходной процесс характеризуется перерегулированием δ = 28 % и заканчивается за время tрег = 0,02 с
Список литературы
1. А.А. Ахметжанов, А.В. Кочемасов «Следящие системы и регуляторы» для студентов вузов. - М. : Энергоатомиздат, 1986г.
2. Смирнова В.И., Петров Ю.А., Разинцев В.И. «Основы проектирования и расчета следящих систем». - М. : Машиностроение, 1983г.
3. Бесекерский В.А., Попов Е.П. «Теория систем автоматического регулирования». – М. : Наука, 1972г.