
Рефераты по рекламе
Рефераты по философии
Рефераты по финансам
Рефераты по химии
Рефераты по цифровым устройствам
Рефераты по экологическому праву
Рефераты по экономико-математическому моделированию
Рефераты по экономической географии
Рефераты по экономической теории
Рефераты по этике
Рефераты по юриспруденции
Рефераты по языковедению
Рефераты по юридическим наукам
Рефераты по истории
Рефераты по компьютерным наукам
Рефераты по медицинским наукам
Рефераты по финансовым наукам
Рефераты по управленческим наукам
Рефераты по строительным наукам
Психология педагогика
Промышленность производство
Биология и химия
Языкознание филология
Издательское дело и полиграфия
Рефераты по краеведению и этнографии
Рефераты по религии и мифологии
Рефераты по медицине
Рефераты по сексологии
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Лабораторная работа: Визначення точності позиціювання промислового робота
Лабораторная работа: Визначення точності позиціювання промислового робота
Лабораторна робота
Тема: Визначення точності позиціювання промислового робота
Мета роботи: Визначити точність позиціювання промислового робота МН-9С у залежності від величний пересування по координатах X та Z.
Обладнання та пристрої:
1. Промисловий робот МП-9С, призначений для пересування виробів згідно з своїми технічними даними.
2. Індикатор годинникового типу з діапазоном вимірювання 0.4 мм і точністю 0,002 мм.
3. Штангенциркуль і лінійка.
4. Набір деталей.
Кількісною величиною, що визначає точність позиціювання промислового робота є помилка позиціювання.
Під помилкою позиціювання будемо розуміти різницю між фактичним положенням умовної точки робочого органа і точкою, заданою програмою.
Помилки позиціювання: помилки пристрою керування, помилки приводів, технологічні похибки виготовлення елементів та вузлів маніпулятора, пружні властивості кінематичних лапок маніпулятора робота, люфти та зазори в кінематичних парах, похибки позиціювання, що залежать від умов експлуатації промислового робота, теоретичні положення точності позиціювання промислових роботів.
Вводимо програму:
F300 - Поворот вліво.
F000 - Висування руки.
F100 - Втягування руки.
точність позиціювання промисловий робот
Отримані дані заносимо в таблицю:
| № досл. |
Частинне значення xi, мк |
xi - а |
(xi - а) 2 |
| 1 | 1 | -3,96 | 15,6816 |
| 2 | 2 | -2,96 | 8,7616 |
| 3 | 4 | -0,96 | 0,9216 |
| 4 | 2 | -2,96 | 8,7616 |
| 5 | 5 | 0,04 | 0,0016 |
| 6 | 2 | -2,96 | 8,7616 |
| 7 | 3 | -1,96 | 3,8416 |
| 8 | 4 | -0,96 | 0,9216 |
| 9 | 5 | 0,04 | 0,0016 |
| 10 | 5 | 0,04 | 0,0016 |
| 11 | 6 | 1,04 | 1,0816 |
| 12 | 4 | -0,96 | 0,9216 |
| 13 | 5 | 0,04 | 0,0016 |
| 14 | 5 | 0,04 | 0,0016 |
| 15 | 6 | 1,04 | 1,0816 |
| 16 | 4 | -0,96 | 0,9216 |
| 17 | 6 | 1,04 | 1,0816 |
| 18 | 5 | 0,04 | 0,0016 |
| 19 | 4 | -0,96 | 0,9216 |
| 20 | 8 | 3,04 | 9,2416 |
| 21 | 9 | 4,04 | 16,3216 |
| 22 | 7 | 2,04 | 4,1616 |
| 23 | 10 | 5,04 | 25,4016 |
| 24 | 7 | 2,04 | 4,1616 |
| 112,9584 |
Середньоарифметичне значення:
![]() .
.
Середнє квадратичне відхилення:
![]() .
.
Розмах розсіювання частинних значень: Р = хі мах - хі мін = 10 - 1= 9
Для заданого числа дослідів приймаємо число інтервалів:
![]() .
.
Визначаємо ціну інтервалу С = Р / К = 9/2 = 4,5.
| № п/п | Діапазон інтервалів, мк | Середина інтервалу, мк |
nm |
q |
f' (x) |
|
1 2 Всього |
1 - 4,5 4,5 - 10 |
3 7 |
10 14 24 |
0,42 0,58 1 |
0,09 0,13 |
Визначаємо частоту q і густину ймовірності f' (x) розподілу частинних значень:
![]() ;
; ![]() .
.
|
xi |
x - а |
|
|
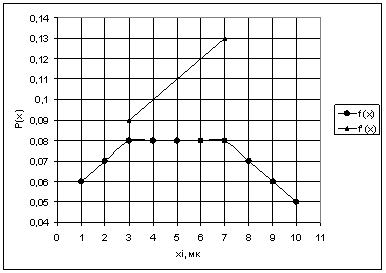
f (x) |
|
10 9 8 7 6 5 4 3 2 1 |
5,04 4,04 3,04 2,04 1,04 0,04 0,96 1,96 2,96 3,96 |
1,07 0,86 0,65 0,43 0,22 0,01 0, 20 0,42 0,63 0,84 |
0,2251 0,2756 0,3230 0,3637 0,3961 0,3989 0,3910 0,3653 0,3271 0,2803 |
0,05 0,06 0,07 0,08 0,08 0,08 0,08 0,08 0,07 0,06 |
Теоретична крива густини ймовірності будується згідно з формулою:
![]() ,
,
де φ0 - табульоване значення густини ймовірності.

![]()
Отже, висунута гіпотеза прийнятна. Відповідно точність позиціювання робота:
Т = ± 3δ = ± 3 · 4,71 = ± 14,13
Висновок: на лабораторній роботі ми визначили точність позиціювання промислового робота МП-9С у залежності від величини пересування по координатах X та Z.
За проведеними розрахунками можна зробити висновок, що прийнята гіпотеза вірна. Дана ймовірність відчиняється закону Гука, точність позиціювання Т = ± 14,13